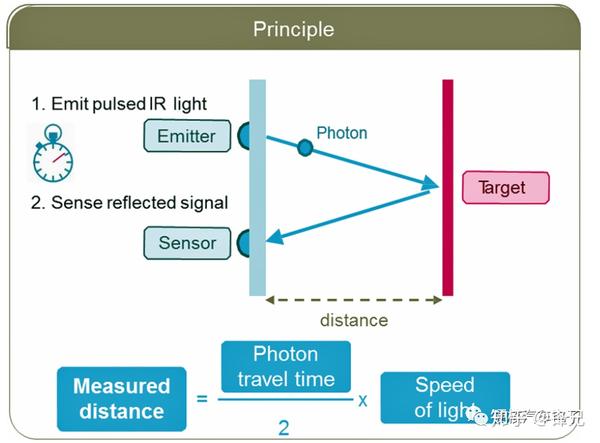
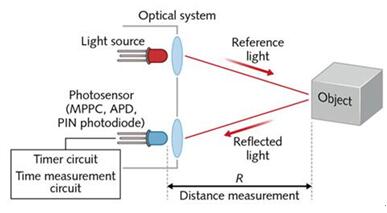
Lidar 原理
激光雷达lidar的工作原理及特点应用分析 电子发烧友网

科技報導 應用於自駕車的光達 Lidar
经验 Epc Egan Fet在lidar应用pcb Layout技巧
Lidar的工作原理 电子发烧友网
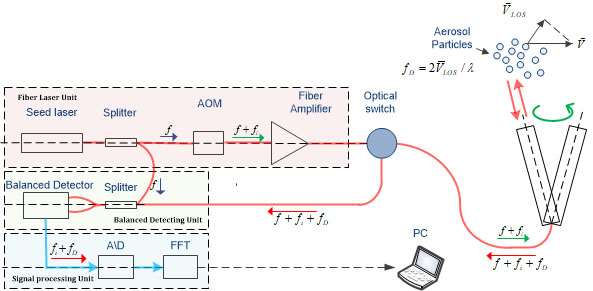
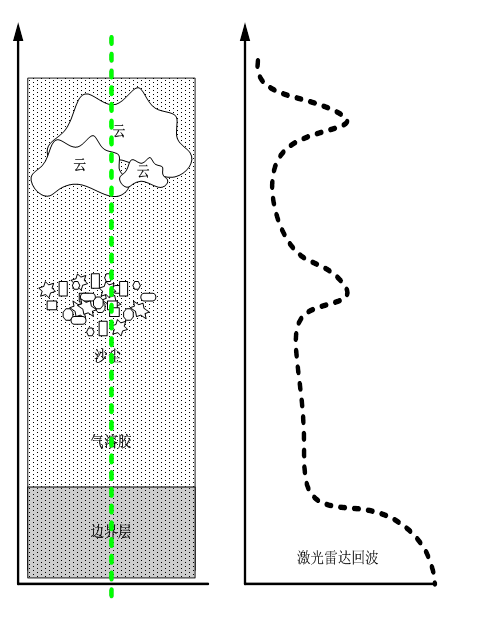
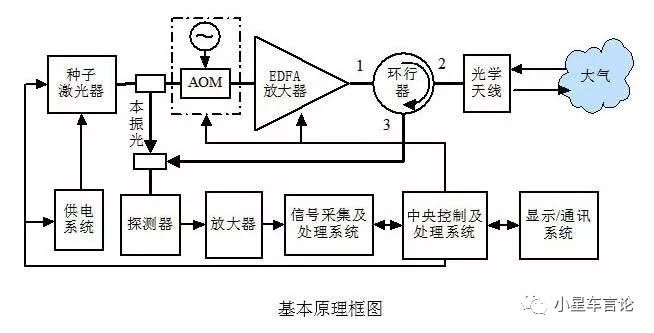
Lidar 测风原理及其风电应用前景 风电聚焦 微信公众号文章阅读 Wemp

无人机三维lidar 测绘是如何工作的 资源与知识 Yellowscan
主要是因為 LiDAR(光學雷達掃描儀)與鏡頭、動作感測是和 iPadOS 架構同時實現軟硬體運算,能夠快速測量深度,如畫面有人遮住或動作時,就不會導致人與背景之間出現明顯白邊或馬賽克情況,AR體驗效果就會更加明顯。 同時蘋果也已經預告「測距儀」App 還會加入「尺標顯示方式」,可進行更精細的測量,並可讓使用者儲存所有測量的列表並搭配截圖,以供日後使用.
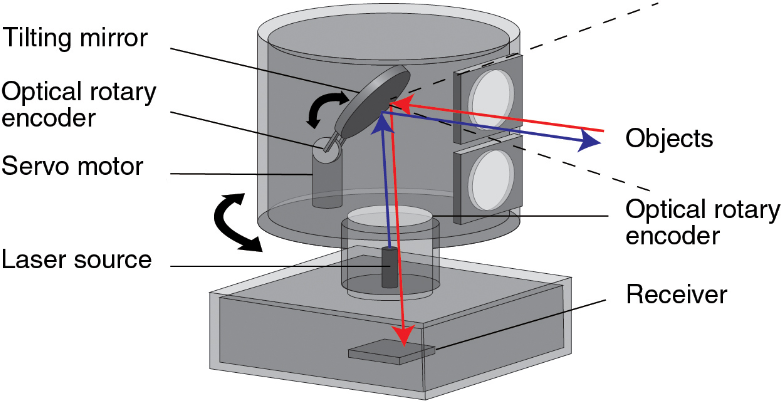
Lidar 原理. 光学雷达,或簡稱光達(英語: lidar, LIDAR, LiDAR ,是英文“light detection and ranging”的缩写) ,是一种光学 遥感技术,它通过向目标照射一束光,通常是一束脉冲激光来测量目标的距离等参数。 激光雷达在测绘学、考古学、地理学、地貌、地震、林业、遥感以及大气物理等领域都有应用 此外,这项. Velodyne基本原理 RPM 600 resolution 02° 600rpm/min = 10frames/s = 1frame/100ms 360° 1 DataPackets = 12 DataBlocks = 24 FiringSeques 1 DataPacket time 1 × 12 × 2 × = 1327 m s 1\times12\times2\times=1327ms 1×12×2× = 1327ms $1Packet/1327ms\approx754Packets/s $. 智慧手機中的 3D 感測功能一直是行動裝置創新的趨勢之一,今年蘋果在最新 iPad Pro 中,蘋果宣布使用 dToF LiDAR 技術。而該技術一在消費性電子產品.
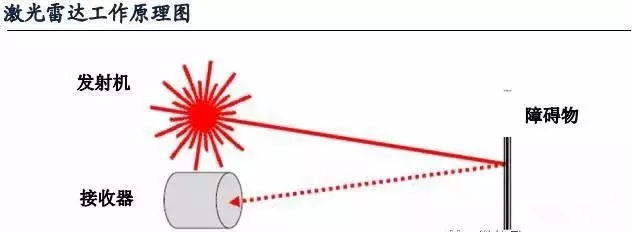
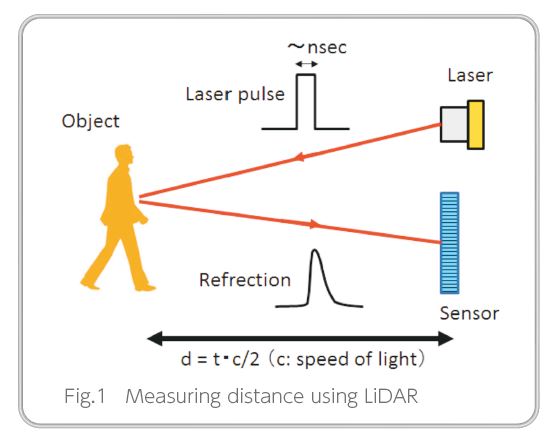
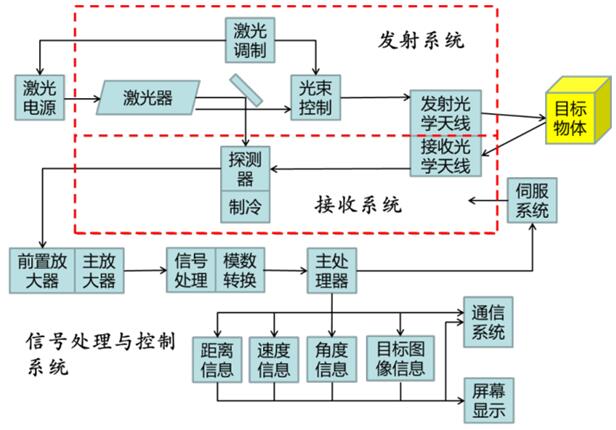
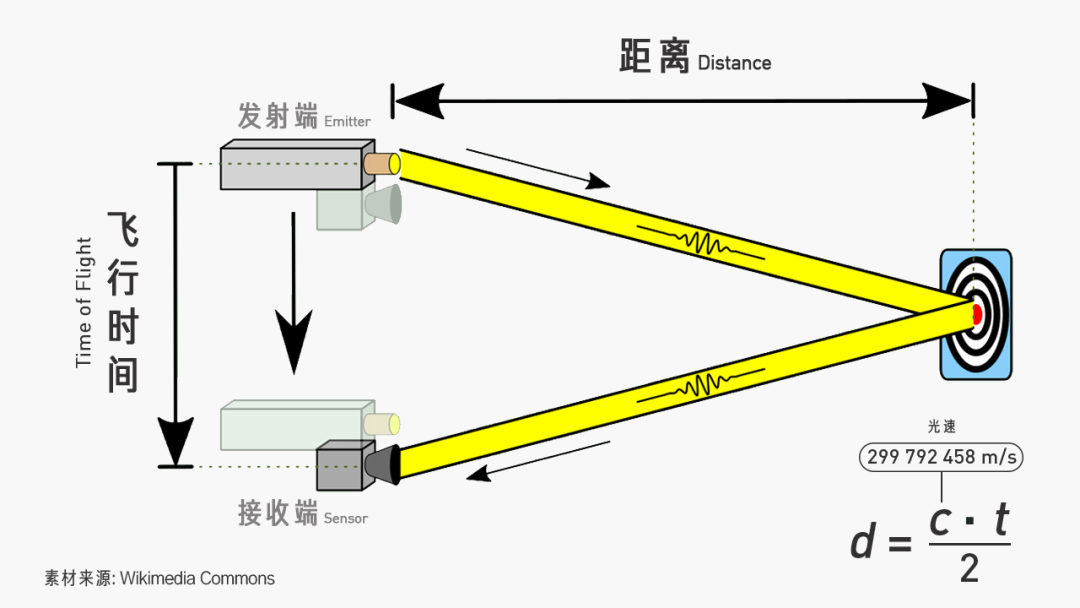
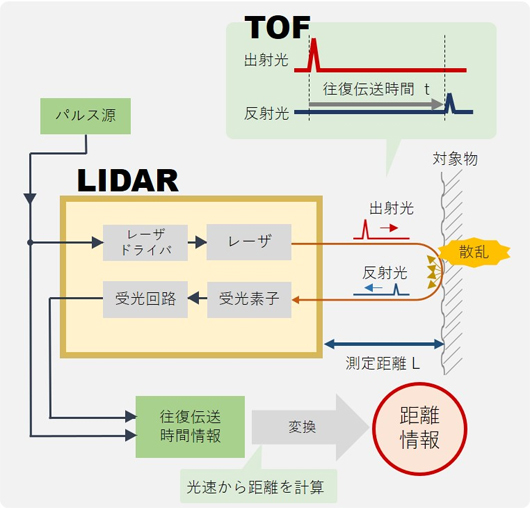
LiDAR 的全稱是Light Detection And Ranging,中文名激光雷達,是以發射激光束探測目標的位置、速度等特徵量的雷達系統,由激光發射機、光學接收機、轉枱和信息處理系統等組成,可獲得目標的距離、方位、高度、速度、姿態、甚至形狀等參數,從而進行探測、跟蹤和識別。 拋開專業術語,通俗理解 iPhone 12 上的 LiDAR,它就是一個能探測物體距離和記錄深度信息的微型裝置,和. Lidar技术 工作原理 编辑 激光雷达最基本的工作原理与无线电雷达没有区别,即由雷达发射系统发送一个信号,经目标反射后被接收系统收集,通过测量反射光的运行时间而确定目标的距离。. 一般來說, LiDAR 採用單束窄帶激光 二極體產生一波長為 905nm 的脈衝波,此 波段屬於紅外線波,對於物體並無穿透性, 絕大部分物體均可反射此脈衝波,換言之, LiDAR 可掃描出物體的輪廓;其次,脈衝光 束是以光速傳播,接收器在下一個光束發射.
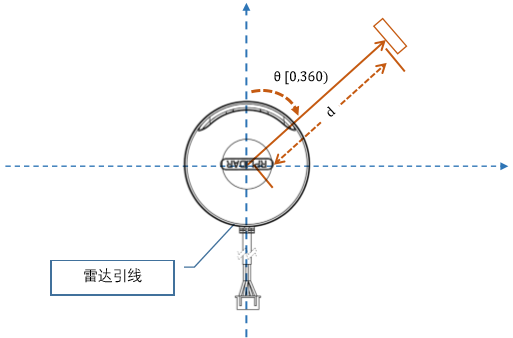
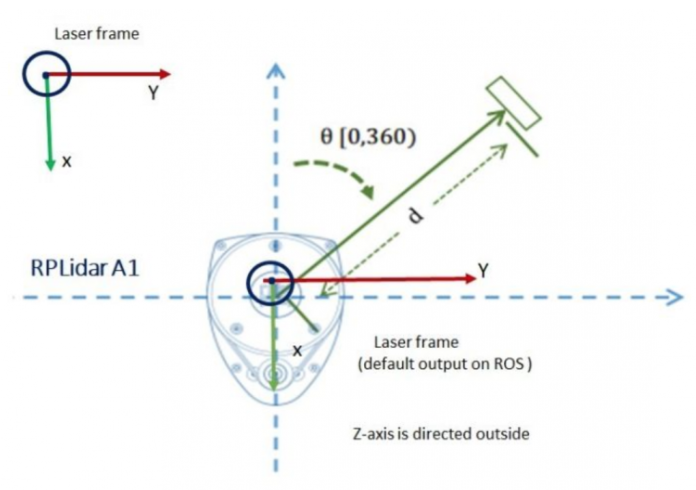
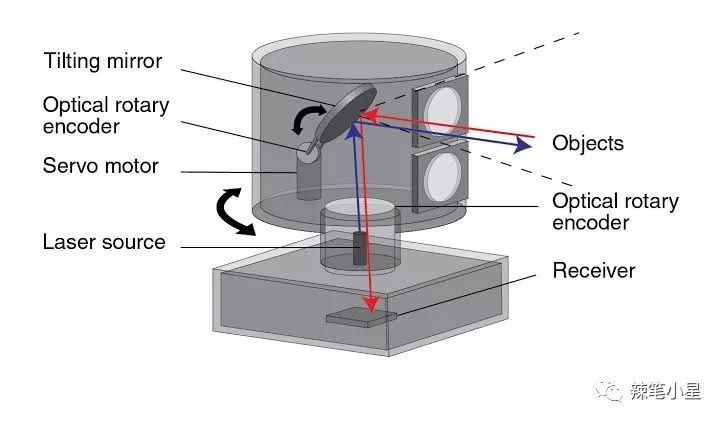
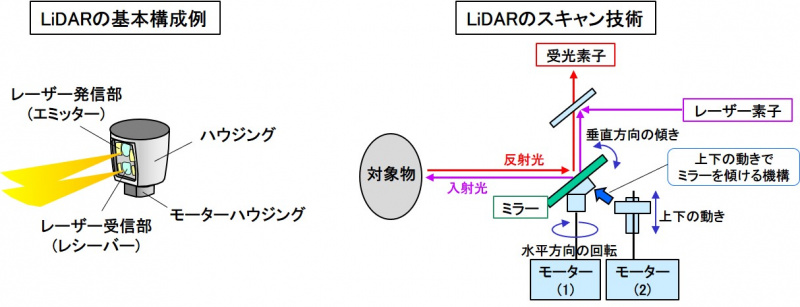
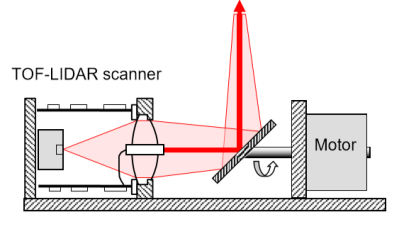
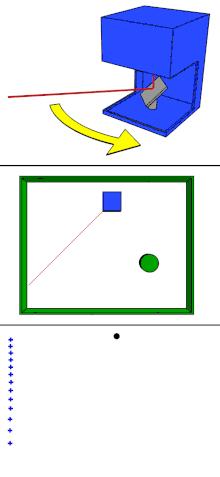
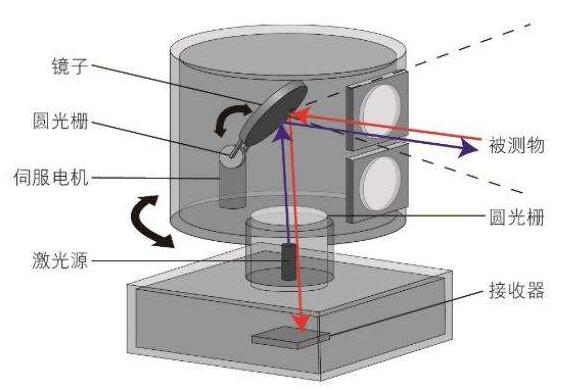
↑ 激光雷达 lidar 工作原理 通过旋转的机械镜面测量激光发出和收到回波的时间差,从而确定目标的方位和距离。由于激光雷达主动发射激光,因此受环境光变化的影响小,测距精确。 什么是激光雷达 lidar 的技术关键 ↑ 典型 激光雷达 lidar 系统组成. LiDAR每旋轉一周收集到的所有反射點坐標的集合就形成了點雲(point cloud)。 圖2 點雲的產生 如圖2所示,LiDAR通過雷射反射可以測出和物體的距離distance,因為雷射的垂直角度是固定的,記做a,這裡我們可以直接求出z軸坐標為sin(a)*distance。. 光達(lidar,LIght Detection And Ranging的縮寫,或稱3D雷射掃描儀)可用於掃描建築物、岩層(rock formations)等,以製作3D模型。 光達的雷射光束可掃描相當大的範圍:如圖中此款的儀器頭部可水平旋轉360度,而反射雷射光束的鏡面則在垂直方向快速轉動。.
蘋果最新推出的iPhone12 Pro、 iPhone 12 Pro Max,除了具備令人驚豔的夜拍功能,另一個主打的亮點,就是首度搭載「LiDAR掃描儀」,它能發射雷射光來判斷物體的距離和深度, 然而大家也非常好奇,究竟LiDAR掃描儀的原理是什麼?又有哪些實際的應用功能?本篇文章將為大家作詳細的介紹。. 2 LiDARの値段・価格 – 安価なLiDARだと数万で購入可能;. ↑激光雷达LiDAR示意图 车用激光雷达工作原理就是蝙蝠测距用的回波时间(Time of Flight,缩写为TOF)测量方法。但要知道光速是每秒30万公里。要区分目标厘米级别的精确距离,那对传输时间测量分辨率必须做到1纳秒。.
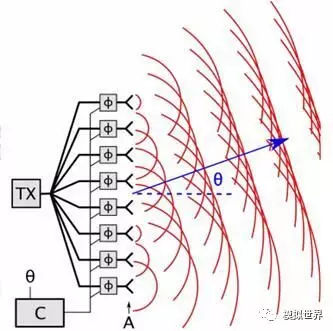
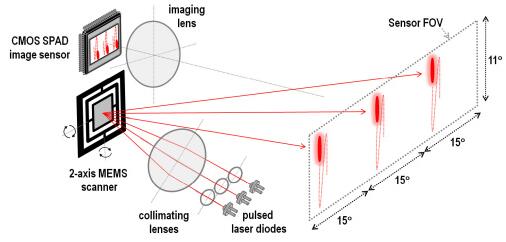
Quanergy 光学相控阵 LiDAR S3 工作原理示意图 光学相控阵 LiDAR 具有扫描速度快(一般都可以达到 MHz 量级以上)、扫描精度或指向精度高(千分之一度量级以上)、可控性好(除对目标区域进行高密度的扫描外,在其它区域也能进行稀疏扫描)等优点。. Lidar原理,技术与应用 主要内容 一、机载lidar原理,技术与应用 二、机载lidar与光学影像的联合处理 三、基于光学成像和激光雷达技术的移动 测量系统 四、地面lidar及在文物保护中的应用 五、结束语 一、机载lidar原理 激光回波测距原理 激光是具有大功率、高度方向性的光束。. 概念 激光lidar与微波lidar的异同 激光雷达是以激光器为辐射源的雷达,它是在微波 雷达技术基础上发展起来的,两者在工作原理和结构 上有许多相似之处 工作频率由无线电频段改变成了光频段 雷达具体结构、目标和背景特性上发生了变化。.
運作原理 旋轉發射器及接收子以掃描週遭環境 藉由光相位矩陣改變雷射光發出角度 幀數(Frame Rate) 受限於旋轉角速度 可隨狀況調整 運作範圍 1m150m 10cm150m 水平偵測角度範圍 360度 601度 垂直偵測角度範圍 360度 601度 重量 重 輕 體積. 事實上早期投資追逐的LiDAR並不是一項全新的概念,早在1932年愛爾蘭物理學家Edward Hutchinson Synge 就提出在成像中應用掃描原理的概念。1960 年美國工程與物理學家Theodore Harold Maiman 發表史上第一台LiDAR。1970 年代之後LiDAR 陸續被應用於大氣研究、月球表. 光学雷达,或簡稱光達(英語: lidar, LIDAR, LiDAR ,是英文“light detection and ranging”的缩写) ,是一种光学 遥感技术,它通过向目标照射一束光,通常是一束脉冲激光来测量目标的距离等参数。 激光雷达在测绘学、考古学、地理学、地貌、地震、林业、遥感以及大气物理等领域都有应用 此外,这项.
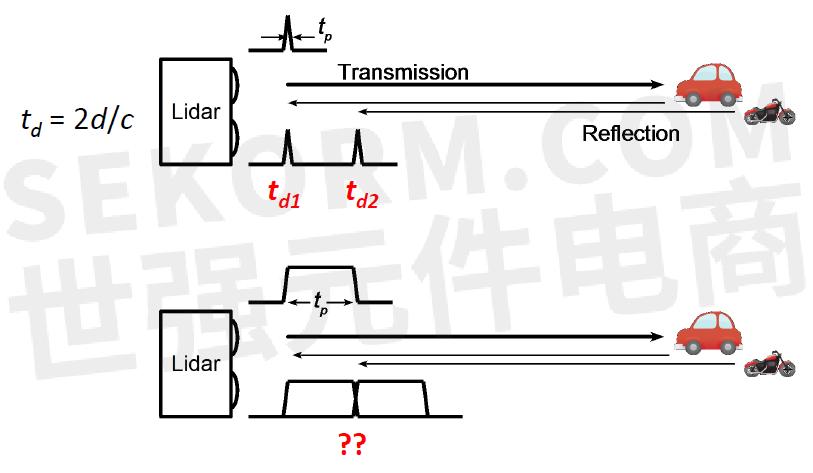
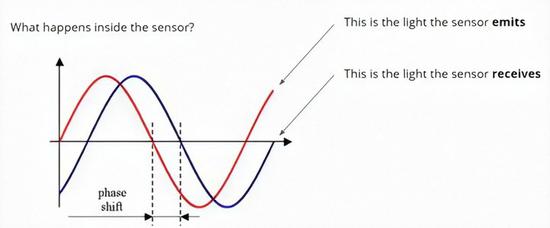
IToF 和 LiDAR 雖說都是 ToF,但區別不小。 第一,發出的「信號」不同。iToF 發出的是經過正弦波調製,明暗強度呈規律變換的光信號。LiDAR 發出的是激光束。 第二,估算距離的原理不同。iToF 靠感知正弦波光信號的差異來「估算」其從發射到反射回來的距離。. 運作原理 旋轉發射器及接收子以掃描週遭環境 藉由光相位矩陣改變雷射光發出角度 幀數(Frame Rate) 受限於旋轉角速度 可隨狀況調整 運作範圍 1m150m 10cm150m 水平偵測角度範圍 360度 601度 垂直偵測角度範圍 360度 601度 重量 重 輕 體積 大 小 價格 高 低. 光達 (Lidar)是英文「 light detection and ranging」的縮寫,是一種光 學遙感技術,它通過向目標照射一束光,通常是一束脈衝雷射來測量目標的距離等參數,原理有多種,這邊舉TOF (Time of Flight)及三角量測法為例,TOF顧名思義就是計算雷射光從雷射模組發射到接收這.
IToF 和 LiDAR 雖說都是 ToF,但區別不小。 第一,發出的「信號」不同。iToF 發出的是經過正弦波調製,明暗強度呈規律變換的光信號。LiDAR 發出的是激光束。 第二,估算距離的原理不同。iToF 靠感知正弦波光信號的差異來「估算」其從發射到反射回來的距離。. Quanergy 光学相控阵 LiDAR S3 工作原理示意图 光学相控阵 LiDAR 具有扫描速度快(一般都可以达到 MHz 量级以上)、扫描精度或指向精度高(千分之一度量级以上)、可控性好(除对目标区域进行高密度的扫描外,在其它区域也能进行稀疏扫描)等优点。. 本ppt属于lidar技术的入门教程,详细介绍了lidar技术的基本原理,发展状况以及应用情况,适合初学者了解学习,推荐用作教师上课ppt。 多传感融合内外参标定(一): lidar imu外参标定工具lidar_align.
↑ 激光雷达 lidar 工作原理 通过旋转的机械镜面测量激光发出和收到回波的时间差,从而确定目标的方位和距离。由于激光雷达主动发射激光,因此受环境光变化的影响小,测距精确。 什么是激光雷达 lidar 的技术关键 ↑ 典型 激光雷达 lidar 系统组成. 光學雷達 ,或簡稱 光達 (英語: lidar, LIDAR, LiDAR ,是英文「 li ght d etection a nd r anging」的 縮寫 ) ,是一種 光學 遙感 技術,它通過向目標照射一束 光 ,通常是一束脈衝 雷射 來測量目標的距離等參數。 雷射雷達在 測繪學 、 考古學 、 地理學 、 地貌 、 地震 、 林業 、遙感以及 大氣物理 等領域都有應用 此外,這項技術還用於機載雷射地圖測繪、雷射測高、雷射雷達. Lidar 是什麼? lidar 從 1960 年開始被發明,透過測量光束從物體返回所需的時間,建立所在空間的深度測繪圖,有點類似蝙蝠在行進中,能夠在一個看不見的環境中,利用超音波回聲偵測環境和獵物,其實原理就像是 lidar 技術。.
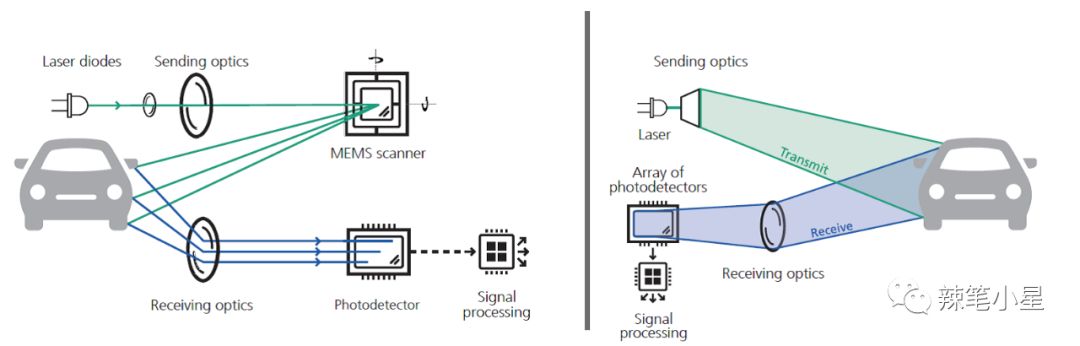
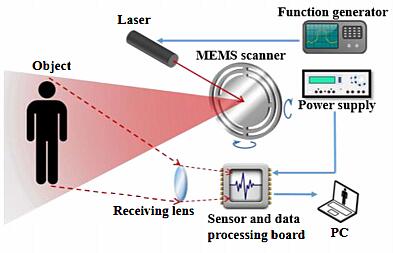
LiDAR 的全稱是Light Detection And Ranging,中文名激光雷達,是以發射激光束探測目標的位置、速度等特徵量的雷達系統,由激光發射機、光學接收機、轉枱和信息處理系統等組成,可獲得目標的距離、方位、高度、速度、姿態、甚至形狀等參數,從而進行探測、跟蹤和識別。 拋開專業術語,通俗理解 iPhone 12 上的 LiDAR,它就是一個能探測物體距離和記錄深度信息的微型裝置,和. 其中LiDAR一直是保持静止状态的,时间越长,点云密度越高,对场景的还原度越好。 Livox激光雷达扫描原理 激光雷达三大模块的选择,基本定义了激光雷达:(1)发射模块(Transmitter)(2)接收模块(Receiver)(3)扫描模块(Scanner),下面就分别介绍Livox的三个模块. Lidar原理,技术与应用 主要内容 一、机载lidar原理,技术与应用 二、机载lidar与光学影像的联合处理 三、基于光学成像和激光雷达技术的移动 测量系统 四、地面lidar及在文物保护中的应用 五、结束语 一、机载lidar原理 激光回波测距原理 激光是具有大功率、高度方向性的光束。.
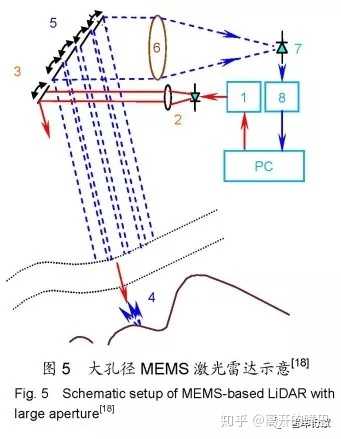
(LiDAR, the acronym of Light Detection and Ranging or Laser Imaging Detection and Ranging, is one of remotesensing technologies applying optics LiDAR may measure the reflected or scattered light from the objects by emitting pulsed laser light to them so that it detects the distance to the said objects and characteristics. LiDAR每旋轉一周收集到的所有反射點坐標的集合就形成了點雲(point cloud)。 圖2 點雲的產生 如圖2所示,LiDAR通過雷射反射可以測出和物體的距離distance,因為雷射的垂直角度是固定的,記做a,這裡我們可以直接求出z軸坐標為sin(a)*distance。. ↑激光雷达LiDAR示意图 车用激光雷达工作原理就是蝙蝠测距用的回波时间(Time of Flight,缩写为TOF)测量方法。但要知道光速是每秒30万公里。要区分目标厘米级别的精确距离,那对传输时间测量分辨率必须做到1纳秒。.
Lidar原理,技术与应用 主要内容 一、机载lidar原理,技术与应用 二、机载lidar与光学影像的联合处理 三、基于光学成像和激光雷达技术的移动 测量系统 四、地面lidar及在文物保护中的应用 五、结束语 一、机载lidar原理 激光回波测距原理 激光是具有大功率、高度方向性的光束。.
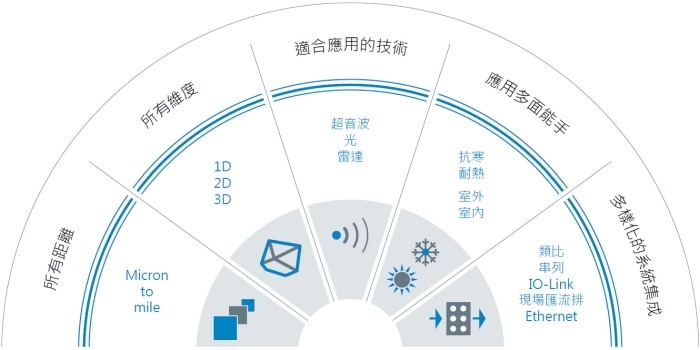
From Micron To Mile Sick的距離與lidar感測器 Sick
Iphone的 第四颗摄像头 位置为什么给了激光雷达 Iphone12 Tof Vr 手机 新浪科技 新浪网

Zephir300 Lidar風力分析儀 慧技科學有限公司
激光雷达工作原理剖析 Slamtec Robot Autonomous Localization And Navigation Solution Supplier Lidar Slam Robot Platform
无人驾驶系列一 激光雷达 Lidar 在无人驾驶技术中的应用 天空之城 Csdn博客 无人驾驶激光雷达

无人机三维lidar 测绘是如何工作的 资源与知识 Yellowscan

Lidarphone攻击将智能吸尘器变成麦克风 小米扫地机器人被黑 中国移动安全信息网

机载lidar技术及其应用 Yhl Leo Csdn博客
无人驾驶技术入门 六 工程师又爱又恨的激光雷达 知乎
5张图1个视频 科普激光雷达工作原理 知乎

激光雷达测距原理是怎样的 Tof激光雷达 激光测距传感器 Lidar 上海申稷光电
科普 激光雷达lidar工作原理 懂车帝
Lidar系列报道 四 汽车lidar的 终结者 全固态lidar 系统集成商 微迷 专业mems市场调研媒体
激光雷达技术 激光 测风雷达 风廓线雷达 镭测创芯 Leice 专业气象 环境 海洋激光雷达系统制造商
激光雷达探测技术研究室

大疆599 的激光雷达是什么原理 机械式激光雷达原理介绍 2 双楔形棱镜型risley Prism Lidar 哔哩哔哩 つロ干杯 Bilibili
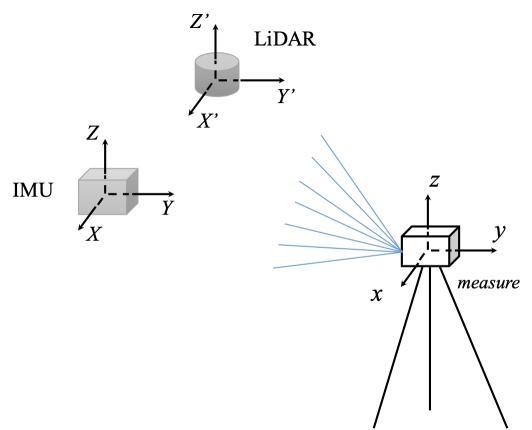
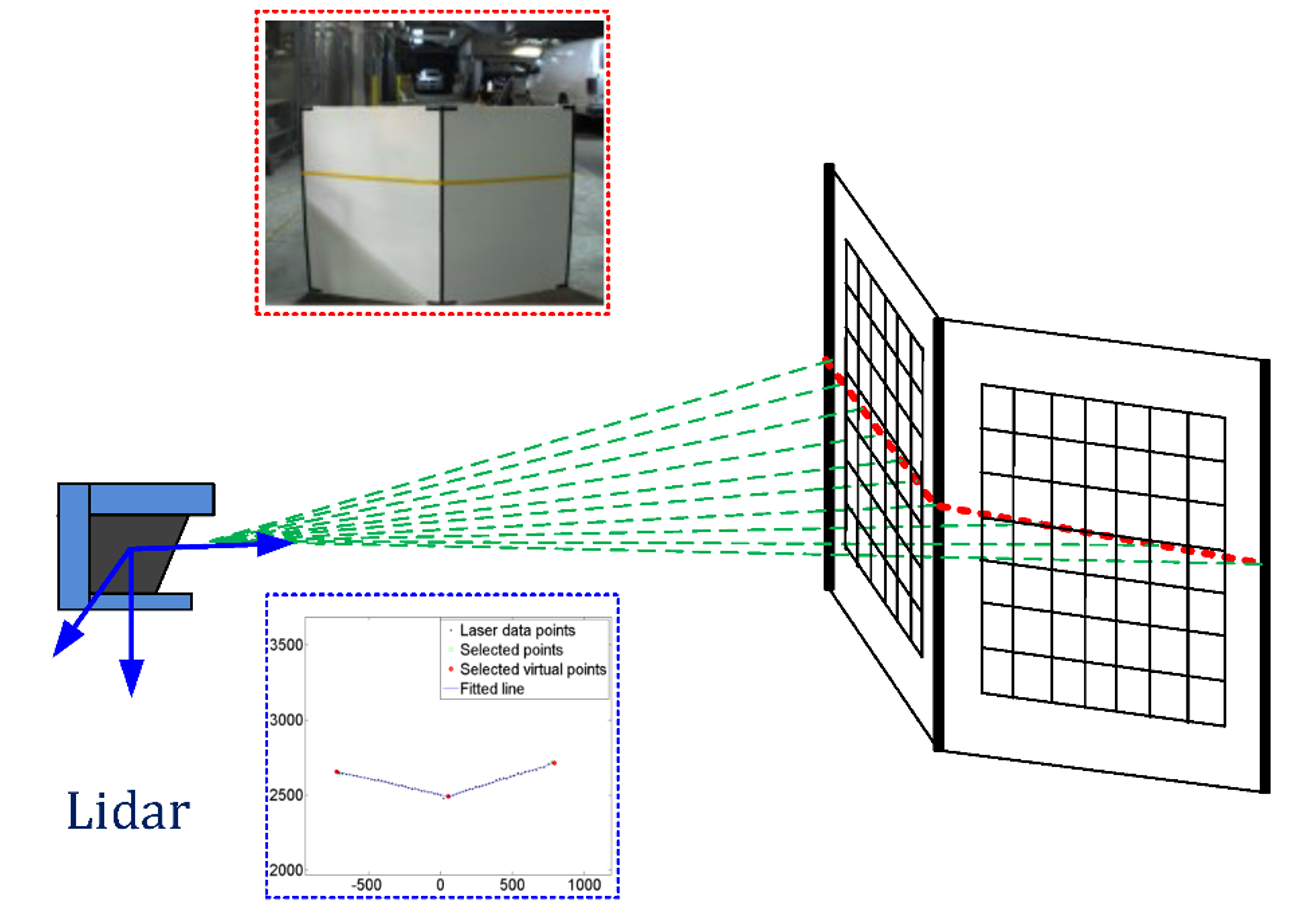
传感器标定系列lidar Imu 秋山居 博客园
Lidarの原理などのまとめ
科普 激光雷达lidar工作原理 测量

激光雷达技术原理 第一章 Ppt 十八文库

原理 全方位レーザーlidarイメージングユニット Hdl Vlpシリーズ Velodyne Lidar 特殊カメラ 特殊センサ 株式会社アルゴ

Lidar技術介紹 每日頭條

検知原理一新の 超lidar レーダーやカメラの技を注入 日経クロステック Xtech

基于机载lidar和倾斜摄影测量的城市实景三维建模 倾斜摄影 无人机之家
激光雷达lidar工作原理 科技新闻 Eda365电子论坛网
Lidar Odometry 莫帮杰
汽车激光雷达顶流之争 马斯克不爱 有人爱 腾讯新闻
无人驾驶之激光雷达深度剖析 图 车云网
It 邦幫忙 一起幫忙解決難題 拯救it 人的一天

固态激光雷达研究进展

滨松推出车载lidar用高性能 高稳定脉冲激光二极管 新产品资讯 公司新闻 新闻活动 滨松中国
机载lidar系统原理与点云处理方法 李峰 刘文龙 摘要书评试读 京东图书

Lidar激光雷达测距原理公式与仪器产品 光辉娱乐激光器周边

技術解析 Velodyne Vs Quanergy 固態激光雷達哪家強 獨家深度 每日頭條

自动驾驶传感器 激光雷达 一 南浔遇雨
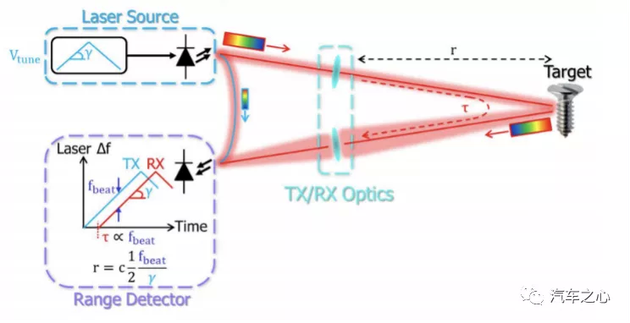
自动驾驶基础 四十一 全固态lidar之调频连续波lidar 自动驾驶测试 汽车测试网
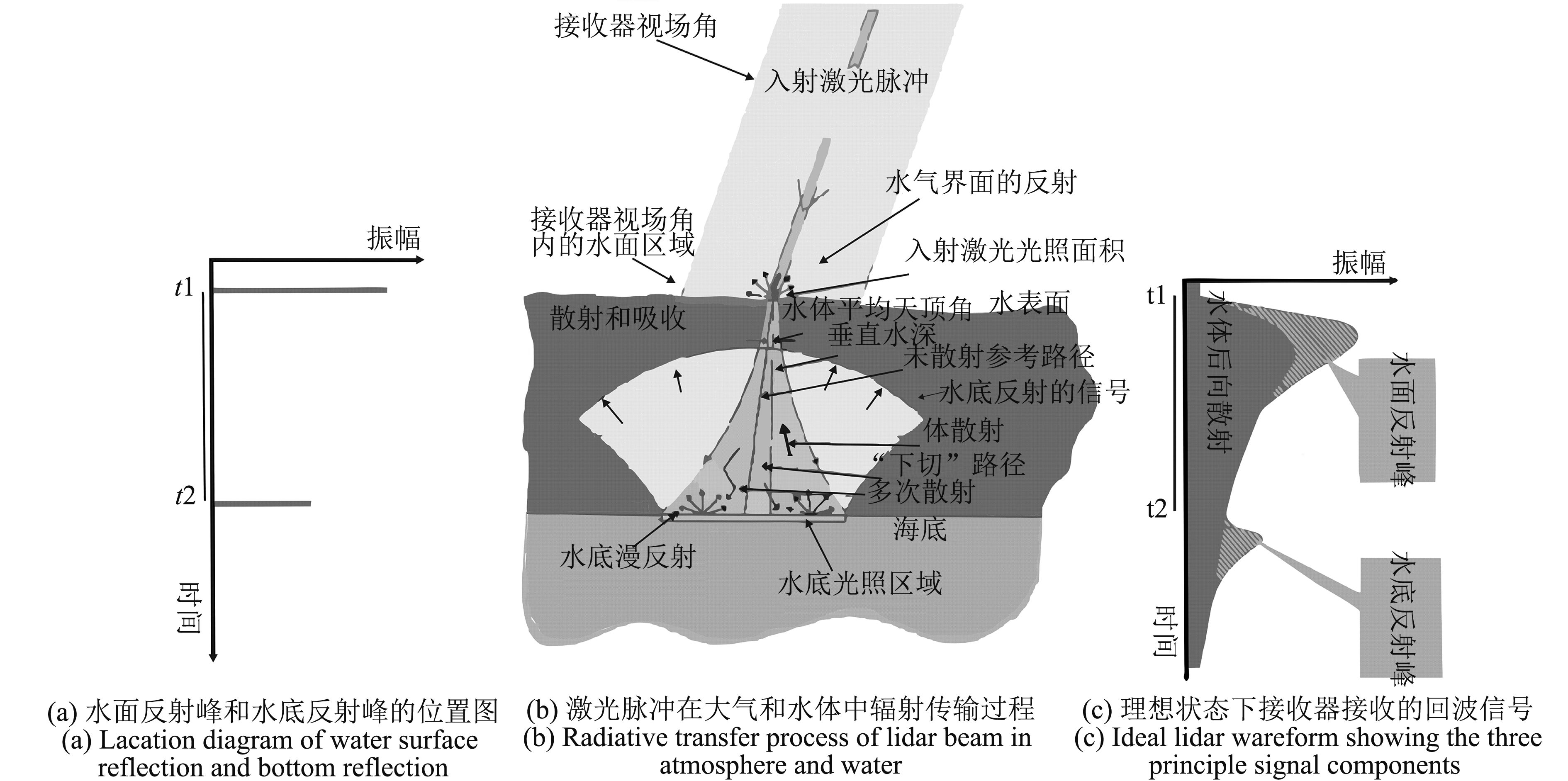
机载激光雷达测深数据处理与应用

財團法人車輛研究測試中心 提供車輛測試 檢測 驗證 外銷 先進系統研發 試車場等服務

激光雷达lidar的起源 发展 原理及应用前景 飞燕航空遥感技术有限公司 专业从事航空遥感 摄影测量 航空摄影 航拍影像 激光雷达 Lidar 航摄 数据处理等3s服务的高科技测绘地理信息企业
最高百亿市值 五大lidar公司齐聚美股车载激光雷达将走向何方 激光雷达 量产车 自动驾驶 新浪科技 新浪网
激光雷达lidar目前的技术难点在哪 关键技术都有哪些 知乎

Iphone12的lidar是什麼 跟ar Structured Light有什麼不同 環耀實境panosensing
深度解析自动驾驶激光雷达技术原理 感知系统的发展趋势 传感技术 与非网

為自動駕駛車輛量身打造的感測器技術 電子工程專輯
科普 激光雷达lidar工作原理 测量
車載3dセンサ向けドライエッチング技術 Ulvac

Spad会成为未来激光雷达的光电探测标配吗 光学器件 微迷 专业mems市场调研媒体
周囲の物体との距離や位置 形状を高精度で計測できる3次元センサー 自動車用語辞典 センサー Lidar Clicccar Com

Lidar 基础 简书

天池
Lidar系列报道 三 汽车lidar的 革新者 混合固态lidar 系统集成商 微迷 专业mems市场调研媒体
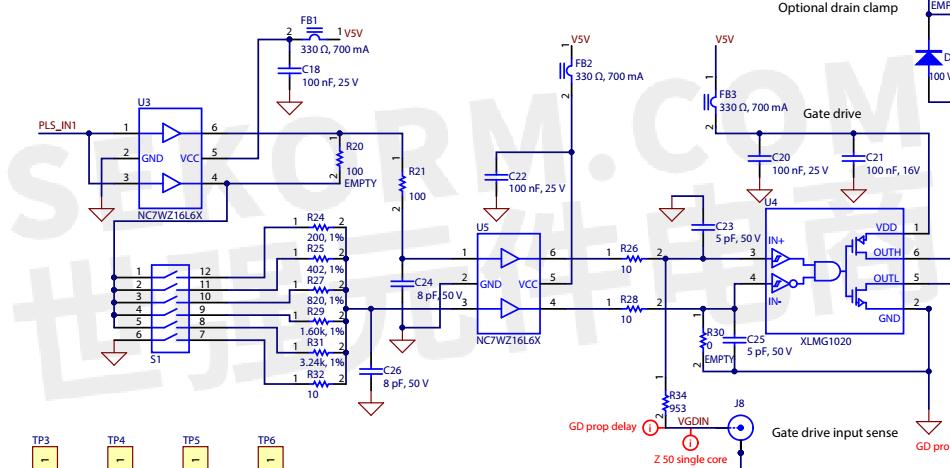
经验 Lidar开发板epc9126 1 2ns窄脉冲信号产生设计原理及调试技巧
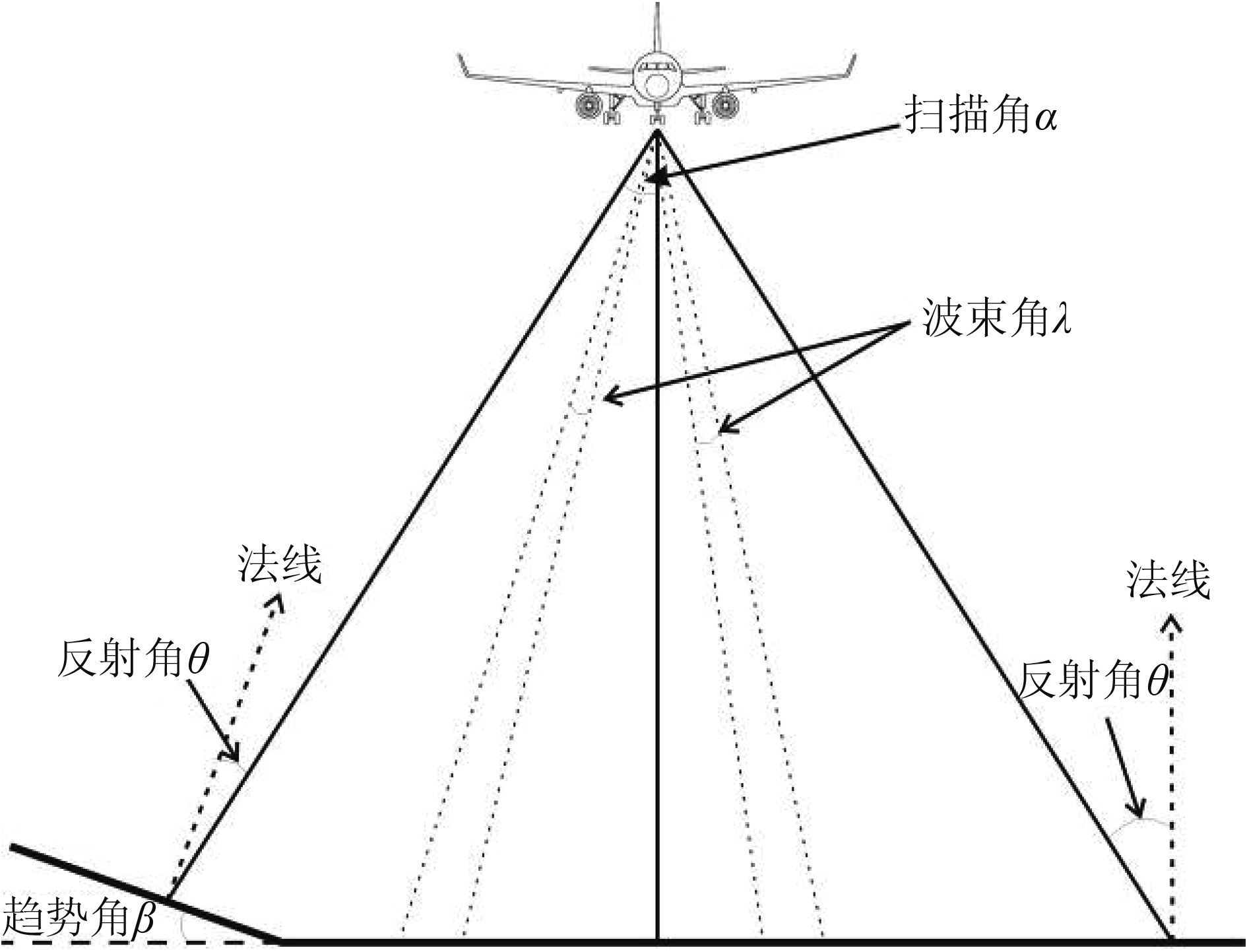
加入地物倾角分析的lidar回波强度校正
社区

輕鬆探索汽車以外的多元化lidar應用 電子工程專輯

科普 激光雷达lidar工作原理 说事论飞 知识分享库 英飞凌资料 英飞凌汽车电子生态圈

ライダーの原理
Tof激光雷达测距原理 Slamtec Robot Autonomous Localization And Navigation Solution Supplier Lidar Slam Robot Platform
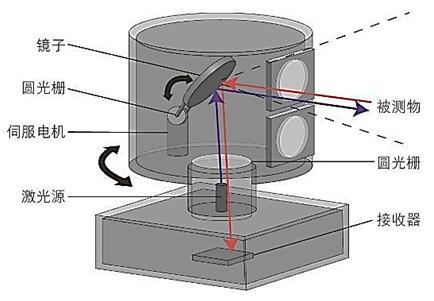
光學尺在激光掃描器上的應用

自动驾驶硬件系统 十二 激光雷达 Lidar 测量模型 知乎

自動駕駛汽車不可或缺的 光達 Lidar到底是什麼 它怎麼讓汽車看得更清楚 T客邦
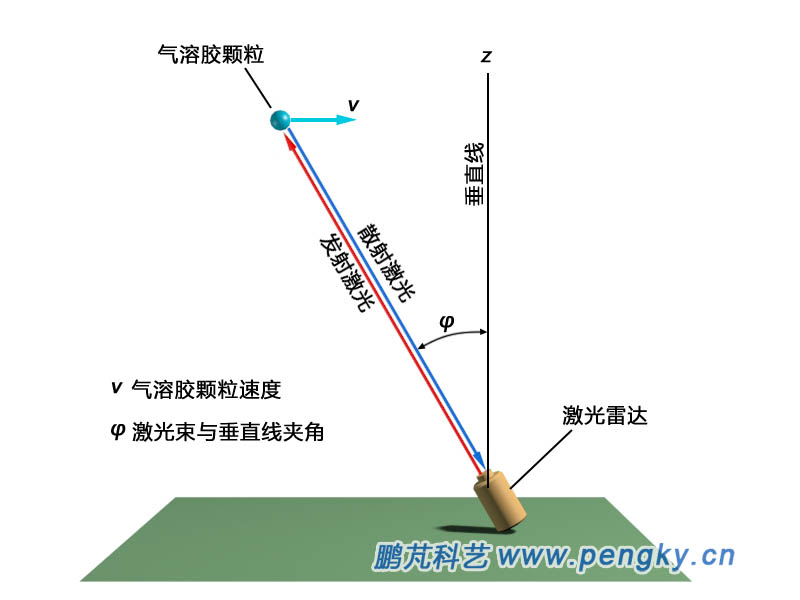
多普勒测风激光雷达 水平轴风力发电机 鹏芃科艺

李家同 為台灣加油打氣專欄 211 單光子累崩光偵測器和飛時測距 Tspe

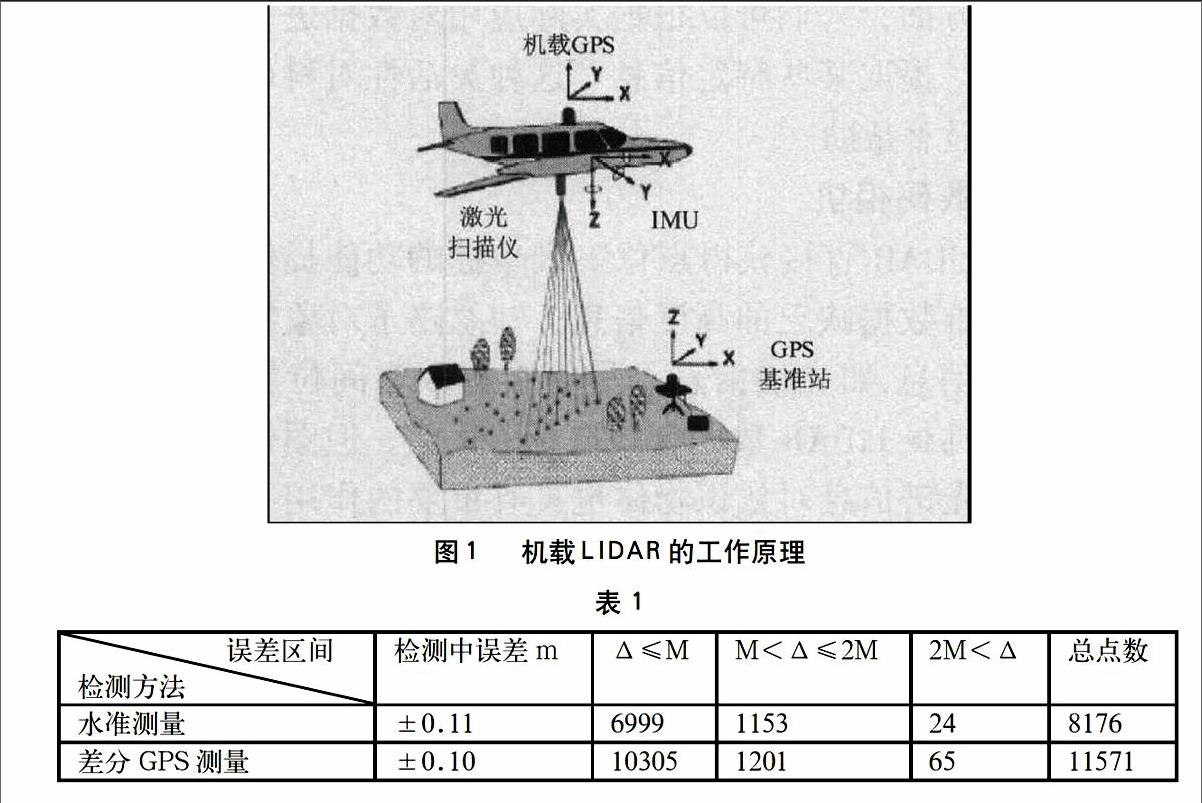
城市工程测量中lidar数据应用研究 新闻 名品家电网
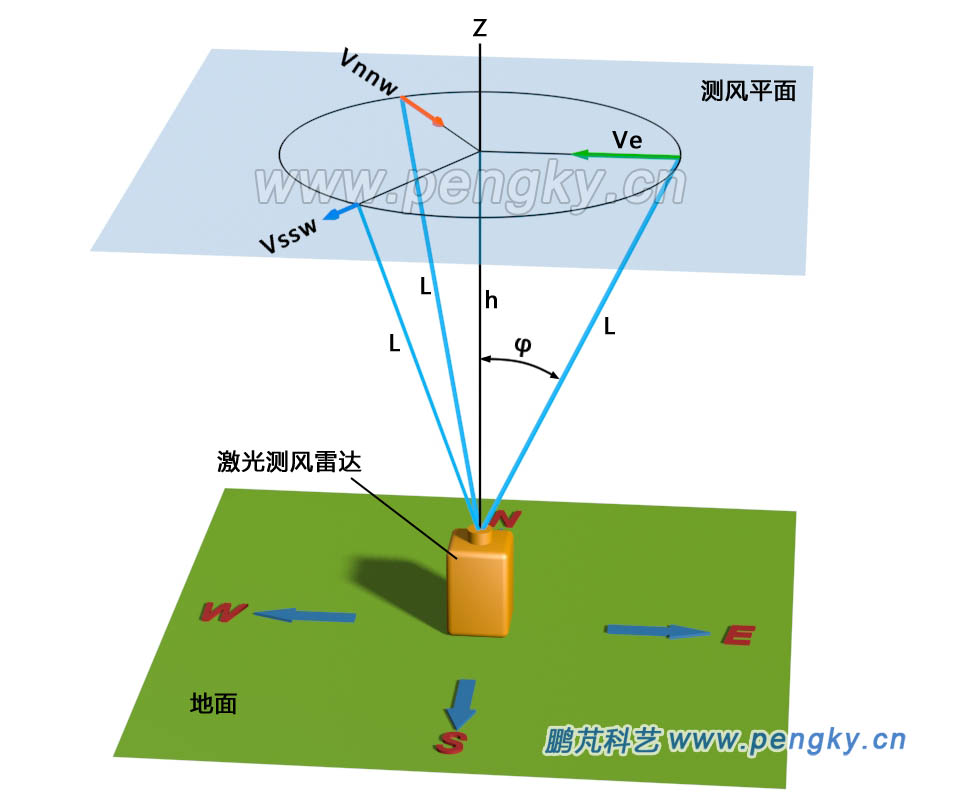
多普勒测风激光雷达 水平轴风力发电机 鹏芃科艺
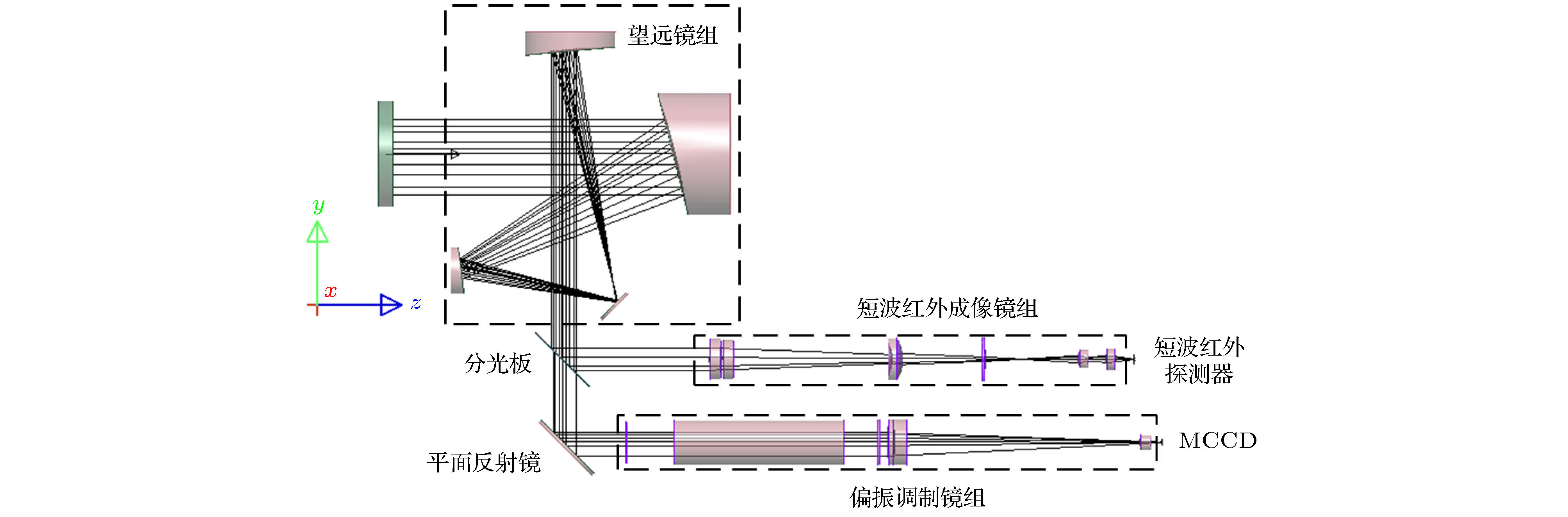
偏振成像激光雷达与短波红外复合光学接收系统设计与分析

技術解析 Velodyne Vs Quanergy 固態激光雷達哪家強 獨家深度 每日頭條
自动驾驶之激光雷达 汽车技术 汽车测试网
基于车载激光系统的地面三维数据获取技术研究 U赢电竞 U赢电竞官网 U赢电竞手机app 电竞竞猜平台
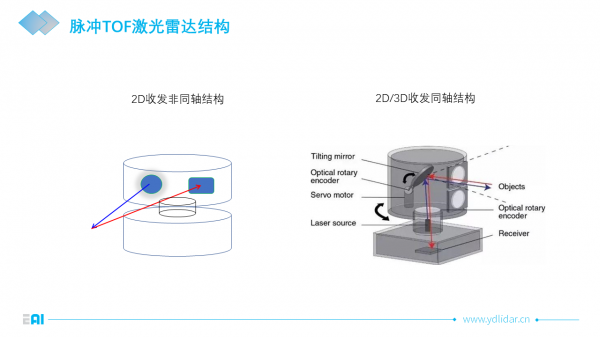
Eai激光雷达公开课 Tof激光雷达的原理及其应用 维科号
汽车lidar的 先行者 机械式lidar Haima1998的专栏 Csdn博客
Tri 拓墣产业研究院 Topology Research Institute
浅谈激光雷达 第22条军规

无人机三维lidar 测绘是如何工作的 资源与知识 Yellowscan
自动驾驶的耳目知多少 激光雷达篇 Ofweek激光网

超低esl高可靠汽车激光雷达 Lidar 探距的两种硅器件方案 村田中文技术社区
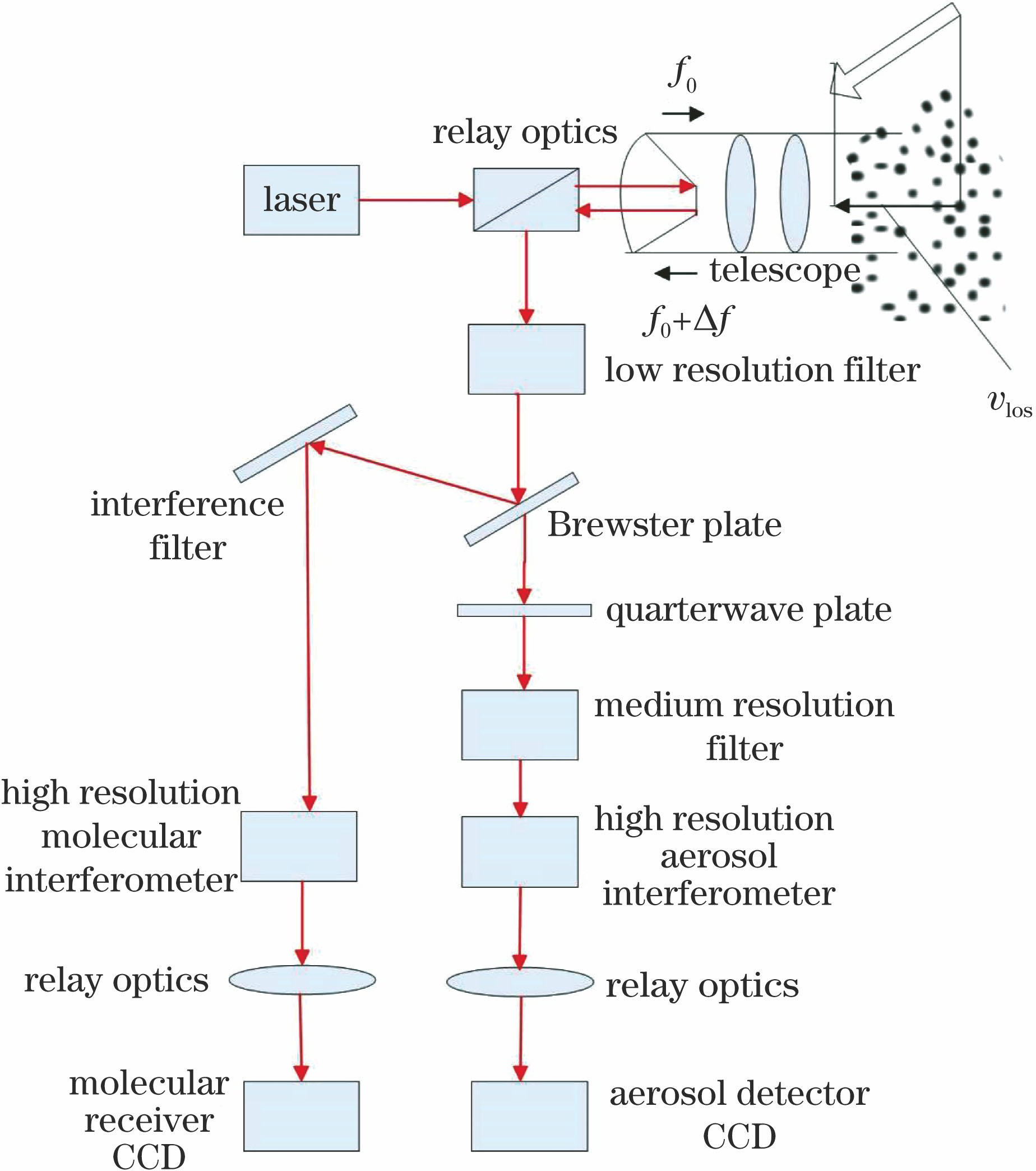
激光多普勒测风技术最新进展 中国光学期刊网

Iphone 的 第四颗摄像头 位置 为什么给了激光雷达 爱范儿

激光雷达探测及三维成像研究进展
Lidar系列報道 四 汽車lidar的 終結者 全固態lidar Mems 微文庫
中文 7分钟讲透机载激光雷达lidar的工作原理 腾讯视频
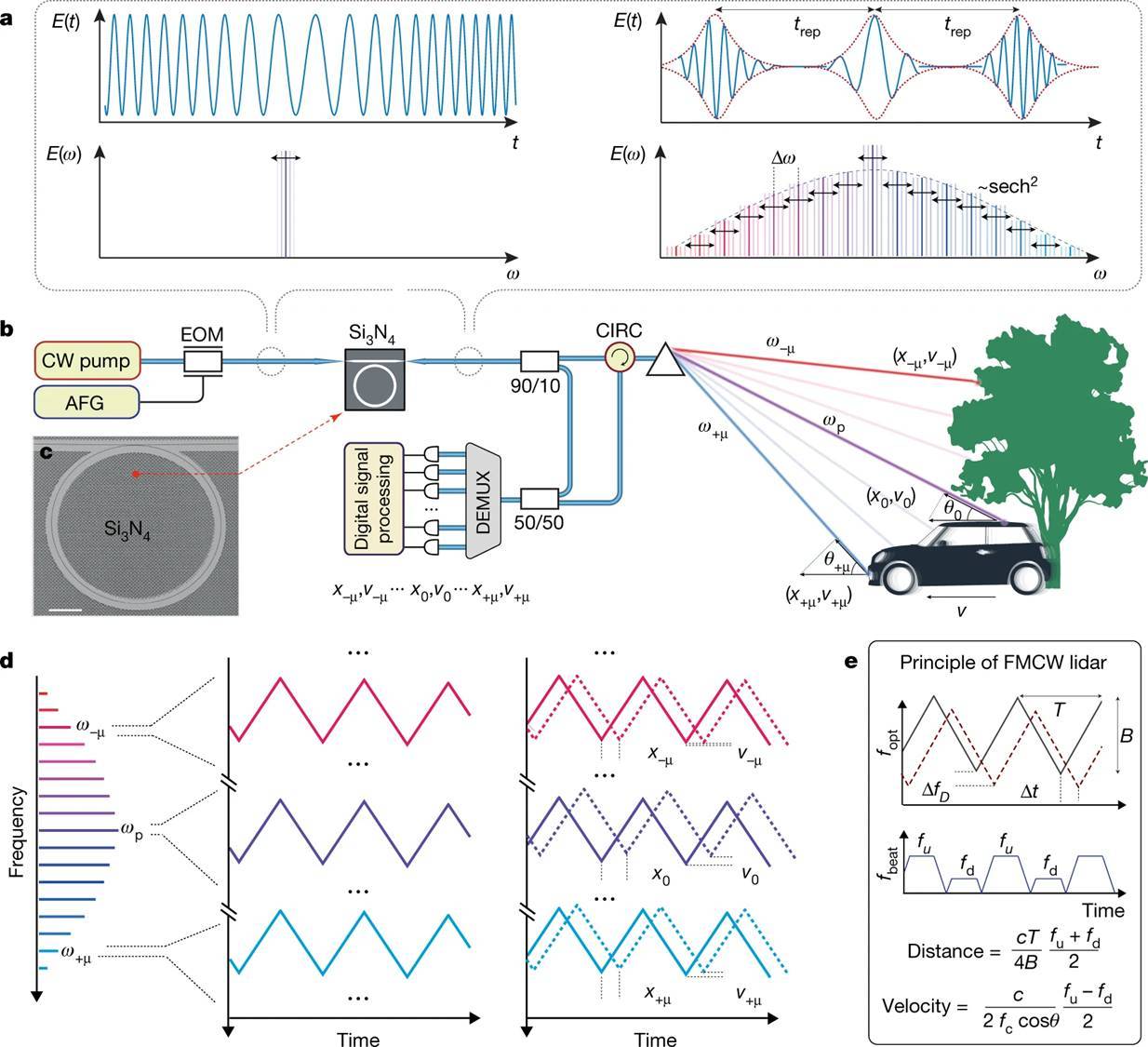
Nature 新方法加快远程相干激光雷达的速度 集成
Iphone 上的激光雷达有什么用 详细解读 最新资讯 热点事件 36氪

Iphone12的lidar是什麼 跟ar Structured Light有什麼不同 環耀實境panosensing

原理 全方位レーザーlidarイメージングユニット Hdl Vlpシリーズ Velodyne Lidar 特殊カメラ 特殊センサ 株式会社アルゴ
激光雷达 Lidar 中激光应用实探 参数决定激光光源的选择 光学器件 微迷 专业mems市场调研媒体

激光雷达探测及三维成像研究进展
Lidar系列报道 三 汽车lidar的 革新者 混合固态lidar 系统集成商 微迷 专业mems市场调研媒体
空間系lidarから水中への展開 1 Sens Aitプロジェクト
5张图1个视频 科普激光雷达工作原理 知乎

无人驾驶正在路上 Lidar产业蓄势待发 厚势 网易订阅
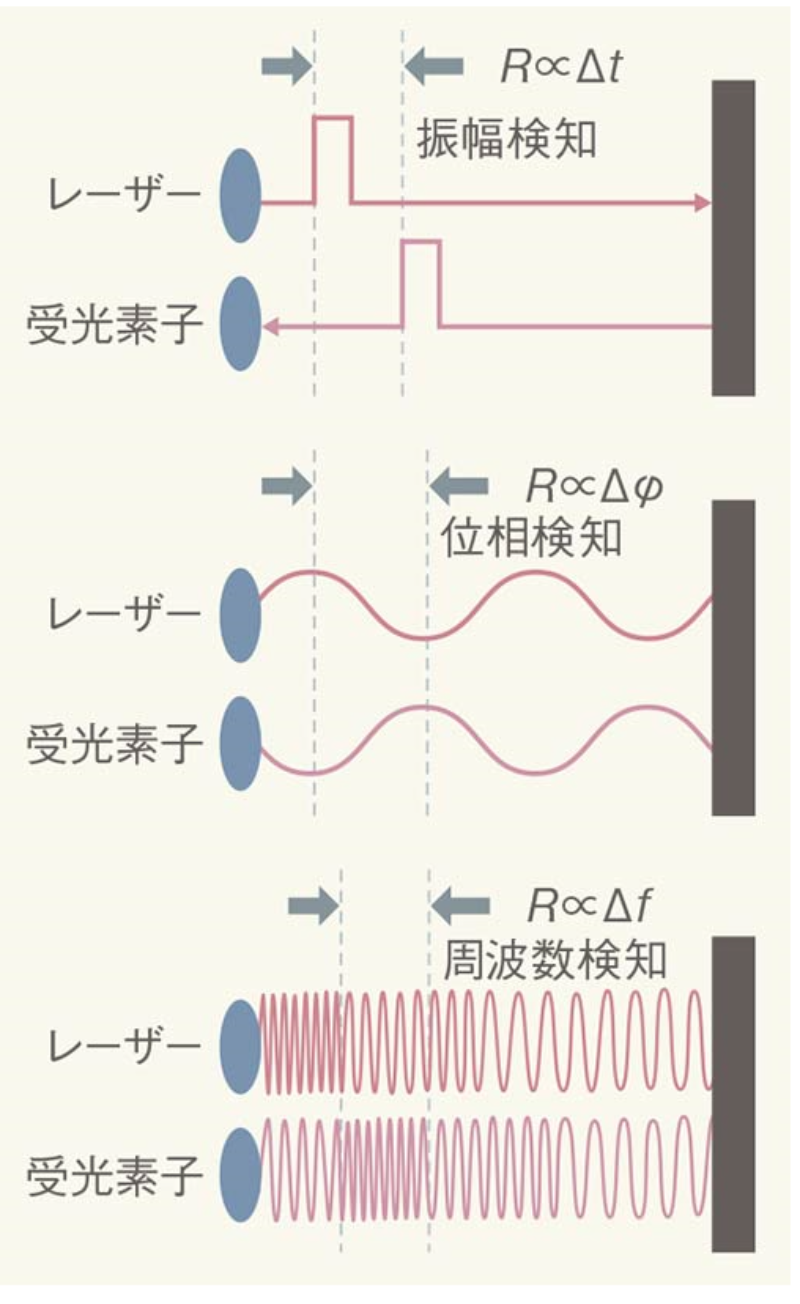
車載lidarの距離計測に脱tofの動き 日経クロステック Xtech
汽车lidar的 先行者 机械式lidar Haima1998的专栏 Csdn博客

輕鬆探索汽車以外的多元化lidar應用 電子工程專輯



