Fmcw Lidar 原理
深度解析自动驾驶激光雷达技术原理 感知系统的发展趋势 传感技术 与非网

Fmcw 雷达基本原理 讨论 中文资源库 Engineerzone
为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体

频率调制连续波激光雷达技术基础与研究进展
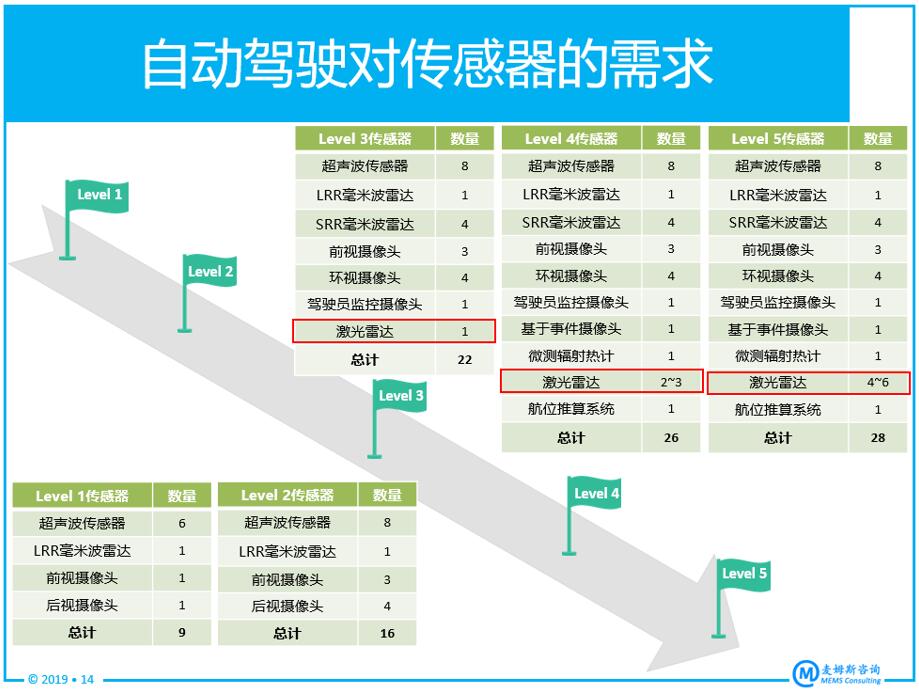
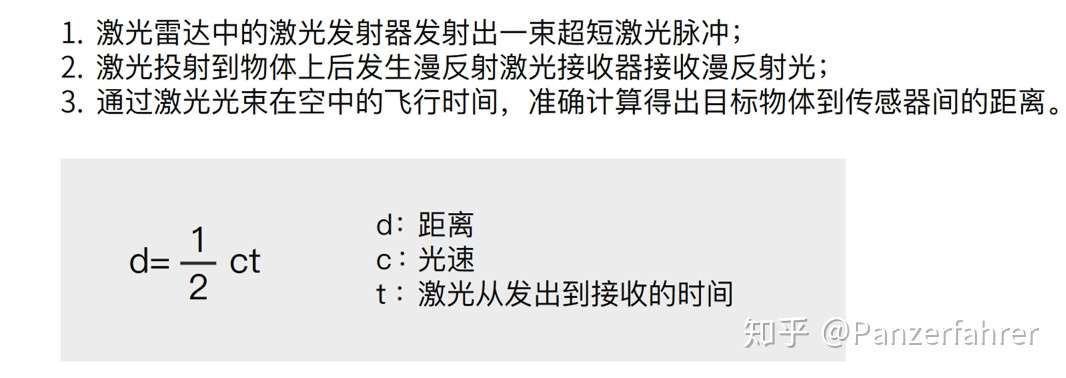
一文读懂激光雷达在自动驾驶中的应用 知乎

相干调频连续波激光雷达畸变补偿技术研究
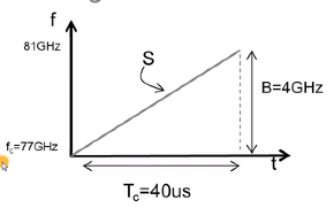
Fmcwレーダの背後にある動作原理を確認してみましょ う。fmcwレーダ・ソリューションで送信する信号は線形 の周波数変調連続波(lfmcw)チャープ・シーケンスで あり、その周波数 時間特性は、次のページの図1に示す のこぎり波のパターンに従います.
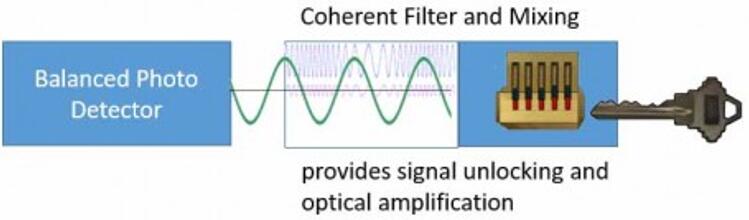
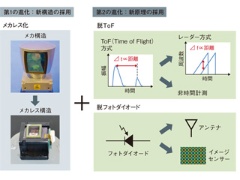
Fmcw lidar 原理. ToF LiDAR Mechanical scanning ω pulses of light scene object Velodyne LiDAR system 64 channels (beams) 905 nm, 13 or 22×106 points per second, 5 Hz rotation, APD photosensors scene object 38. ライダー(Lidar ソナーやレーダーと響きが似ているのは偶然ではない、それらは皆同じ原理である「反響定位法(echo location)を採用している. 原理 21 デジタルコヒーレントライダー デジタル信号処理を用いたFMCWLiDARの構 成をFig1に示す.直接変調半導体レーザを光源 として用い,光検出器から出力されるビート信号 ④ ミキサにて送信波と受信波を混合し、IF(中間周波数)信号を生成 ② Tx.
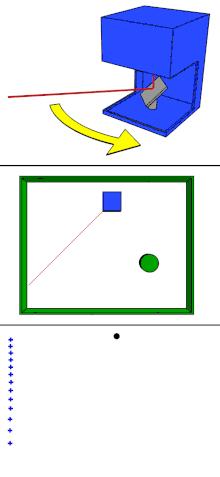
LIDAR(LIght Detection And Ranging)システムは、RADAR と同様な原理に基づいて開発 された、広い範囲を対象に物体の位置、距離、形状を特定するシステムのひとつです。 LIDAR システムは、対象範囲にレーザー光(パルス光または連続光)を照射する機能と、. Fig1 FMCWLiDAR with digital signal processing 2 原理 21 デジタルコヒーレントライダー デジタル信号処理を用いたFMCWLiDARの構 成をFig1に示す.直接変調半導体レーザを光源 として用い,光検出器から出力されるビート信号. カメラベースの距離センサ(ステレオカメラ、プロジェクション)とLiDARは原理が根本的に異なる。 一方でLiDARはTime of Flight (光の飛行時間)をベースにして距離を測ります。 原理としては単純で、下記の図のようにレーザ光を筐体から放ち、そのレーザが物体に反射して返ってくるまでの時間を計測する。 もしレーザ光が10秒後に返ってきて光速を単純のため1m/sと.
干渉型の fmcw lidar と非干渉型の fmcw lidar の開発を行っています。干渉型 lidar では,上述の k サンプリング法や光周波数掃引の線形化技術を利用して,0 m の距離測定に成功しています。測定の高速化,精度向上や長距離測定などを目指して研究しています。. FMCW(周波数連続変調)方式は、時間の経過に応じて周波数が直線的に上昇するように変調を行った電波を送信する方式です。 この変調を行った送信波をチャープと呼びます。 他の変調方式と比較し、距離と速度測定が同時に可能、回路構成が容易、比較的少ない信号処理で高距離分解能を取得可能といった特徴があります。 1 FMCW方式では、送受信信号から生成さ. 自動運転のためのLIDARの仕様の検証 Investigation of Specification of LIDAR for Autonomous Driving 西田 健1,榎田 修一1,鮎 秀平1,徳留 成亮1 Takeshi Nishida1, Shuichi Enokida2, Shuhei Ayukawa1, Naruaki Tokudome1 1 九業大学 1Kyushu Institute of Technology Abstract LIDAR (light detection and ranging) is an important sensor system for autonomous driving.
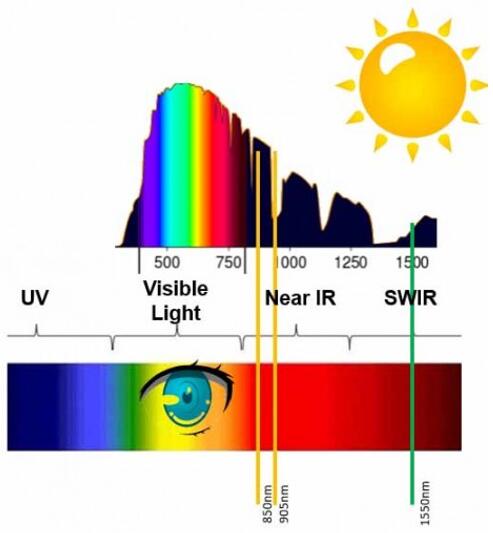
35 fmcw lidar用各種cwレーザ(波長1550nm帯) ジセンサの中のlidarの立ち位置、通常のtof方式とfmcw方式の原理と性能、ソリッドステートlidarの開発状況などを俯瞰する。また、ソリッドステートライ. 3d 三次元lidarの原理 LiDAR(Light Detection And Ranging)とは LiDAR(ライダー)は光学式レーダー又はレーザーレーダーとも言われ、電磁波の代わりにレーザー光を用いて距離センシングと二次元又は三次元の空間イメージングをレーザー画像から行うことができる技術. 自動運転のためのLIDARの仕様の検証 Investigation of Specification of LIDAR for Autonomous Driving 西田 健1,榎田 修一1,鮎 秀平1,徳留 成亮1 Takeshi Nishida1, Shuichi Enokida2, Shuhei Ayukawa1, Naruaki Tokudome1 1 九業大学 1Kyushu Institute of Technology Abstract LIDAR (light detection and ranging) is an important sensor system for autonomous driving.
3 可視光半導体レーザーを用いたlidar 31 可視光lidarの構成 32 空間情報と色情報取得 4 可視光lidarの応用 41 カラー3次元情報取得 42 lidarを中心とした機能融合 43 ヘッドライトにおける展開 5 おわりに 22 fmcw方式lidar 1 まえがき 2 fmcw方式の原理と課題. 35 fmcw lidar用各種cwレーザ lidarの応用分野や、現在の3次元イメージセンサの中のlidarの立ち位置、通常のtof方式とfmcw方式の原理と性能、ソリッドステートlidarの開発状況などを俯瞰する。また、ソリッドステートライダーの中でも、高解像度が期待される. 35 fmcw lidar用各種cwレーザ(波長1550nm帯) ジセンサの中のlidarの立ち位置、通常のtof方式とfmcw方式の原理と性能、ソリッドステートlidarの開発状況などを俯瞰する。また、ソリッドステートライ.
自動運転のためのLIDARの仕様の検証 Investigation of Specification of LIDAR for Autonomous Driving 西田 健1,榎田 修一1,鮎 秀平1,徳留 成亮1 Takeshi Nishida1, Shuichi Enokida2, Shuhei Ayukawa1, Naruaki Tokudome1 1 九業大学 1Kyushu Institute of Technology Abstract LIDAR (light detection and ranging) is an important sensor system for autonomous driving. 3d 三次元lidarの原理 LiDAR(Light Detection And Ranging)とは LiDAR(ライダー)は光学式レーダー又はレーザーレーダーとも言われ、電磁波の代わりにレーザー光を用いて距離センシングと二次元又は三次元の空間イメージングをレーザー画像から行うことができる技術. 4.レーダの原理 41 測位と測速 レーダに要求される基本機能は,位置測定機 能(測位)および相対速度測定機能(測速)の 二つである.図1 に測位原理を示す. 図1 レーダの測位原理 レーダは内部で発生した電波を外部空間に向.
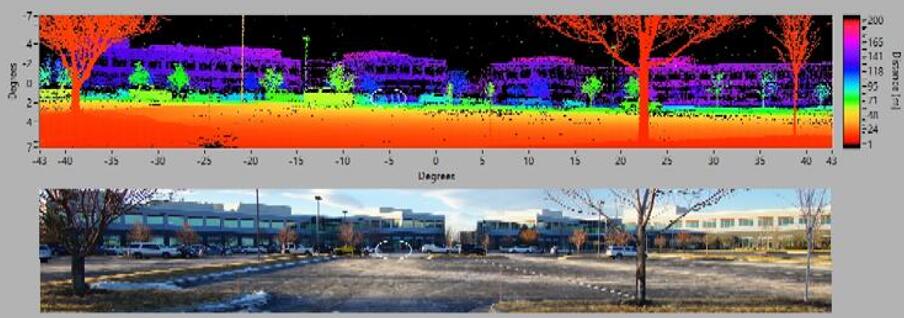
ライダー(Lidar ソナーやレーダーと響きが似ているのは偶然ではない、それらは皆同じ原理である「反響定位法(echo location)を採用している. A new concept of “digital coherent LiDAR” is proposed, which employs digital signal processing of received signals to compensate for various impairments such as nonlinear frequency chirp and FM noise of light sources A proofofprinciple experiment is reported on FMCW distance measurement with a directly modulated laser diode. るlidar 装置の分析をします。 どのような一般的な用途においても、特に小高い丘陵や 山岳地形でのデータ収集時に、最新のシングルチャンネル266,000 測定/秒のlidar 装置が、 最新のデュアルチャンネル500,000 測定/秒のlidar 装置の性能を凌ぐ事をデモンストレー.
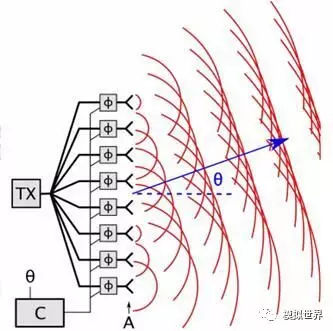
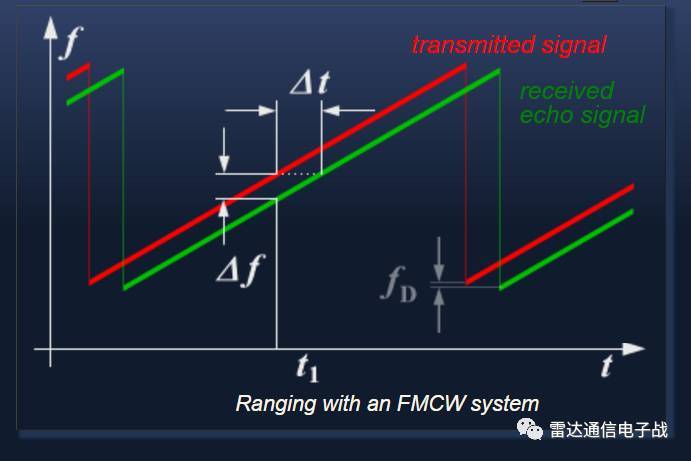
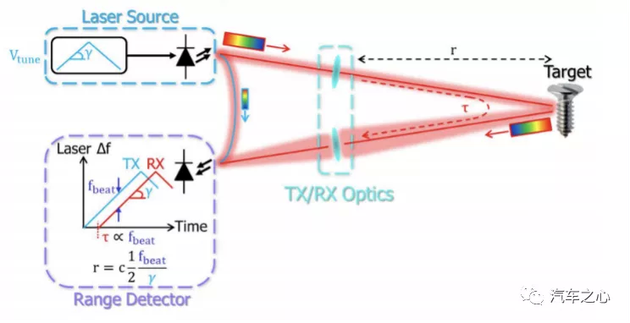
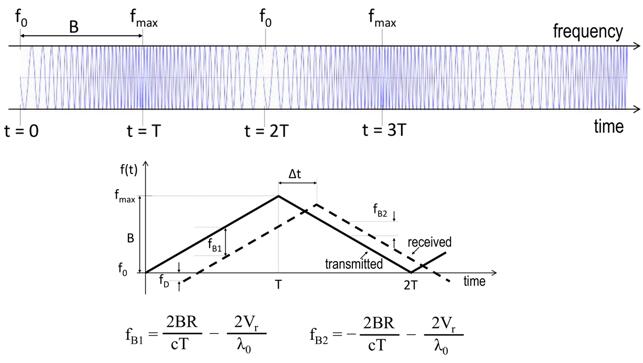
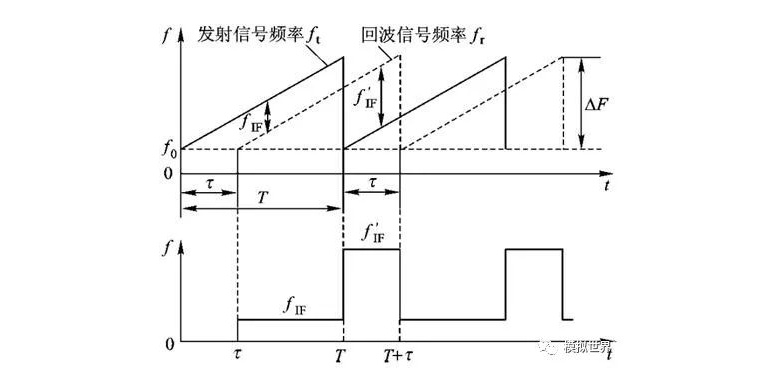
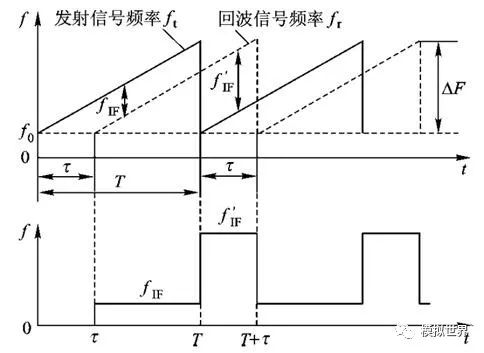
Fmcwレーダ・システムはチャープ信号を送信し、その経路 上にある物体から反射された信号をキャプチャします。図3 に、fmcwレーダの主なrf部品で構成された、簡略化した ブロック図を示します。レーダは、以下のように動作します。. 干渉型の fmcw lidar と非干渉型の fmcw lidar の開発を行っています。干渉型 lidar では,上述の k サンプリング法や光周波数掃引の線形化技術を利用して,0 m の距離測定に成功しています。測定の高速化,精度向上や長距離測定などを目指して研究しています。. ものにfmcwレーダ(図2)があります.fmcwレー ダは周波数変調した連続波を送信し,送信波と反射波 の周波数差(ビート周波数)から距離を求める方式です. 図2のように周波数を直線的に変化させた場合,物 体までの距離rは,次式で求められます..
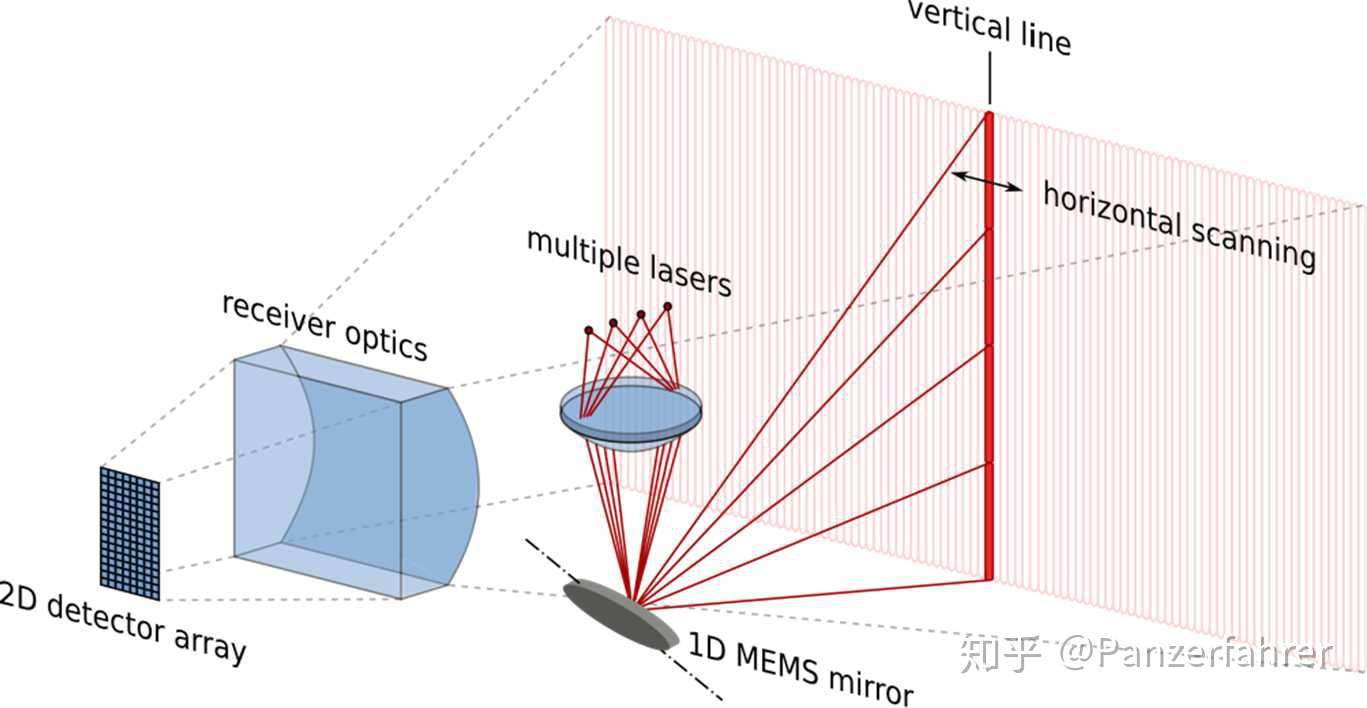
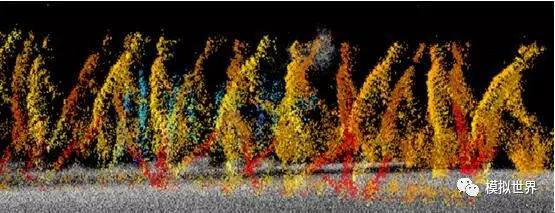
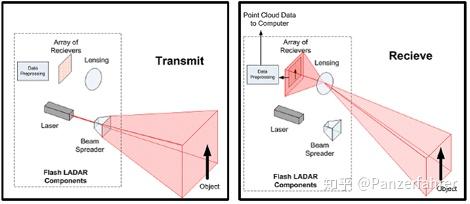
此fmcw雷達已經被廣泛應在汽車行業中先進汽車駕駛輔助系統(adas)間的 一個關鍵零組件。 在本文中我們將利用一套獨特的工具鏈,來建模和模擬完整的77 ghz 之fmcw 雷達系統,包括波形形成、天線特性,通道干擾和雜訊,以及決定距離和速度的 數位訊號處理. マルチビームフラッシュライダーのしくみ Angus Pacala 18年11月8日 マッピング機器構成として1つの OS1に 64 個のセンサーが搭載されている. 前節で解説されたレーザー光と物質の各種の相互作用を利用して,大気等の測定対象の物理量を測定する様々なライダー(lidar)方式がある 2)~9) .ここでは,観測研究等に実際に利用されているものを中心に各種ライダー(lidar)方式を概説する. 27・2・1 幾何光学的散乱を利用するライダー.
前節で解説されたレーザー光と物質の各種の相互作用を利用して,大気等の測定対象の物理量を測定する様々なライダー(lidar)方式がある 2)~9) .ここでは,観測研究等に実際に利用されているものを中心に各種ライダー(lidar)方式を概説する. 27・2・1 幾何光学的散乱を利用するライダー. 論文では,同社独自のLiDAR方式である「Swept Source Lidar」を提案し,その原理実証を行なった。 Swept Source Lidarは,波長分散による非機械式ビーム偏向とFMCW(Frequencymodulated continuouswave)法による距離計測を,同時かつ連続的に実行する。. Amazonで伊東 敏夫のLiDAR技術の原理と活用法自動運転の技術 (設計技術シリーズ)。アマゾンならポイント還元本が多数。伊東 敏夫作品ほか、お急ぎ便対象商品は当日お届けも可能。またLiDAR技術の原理と活用法自動運転の技術 (設計技術シリーズ)もアマゾン配送商品なら通常配送無料。.
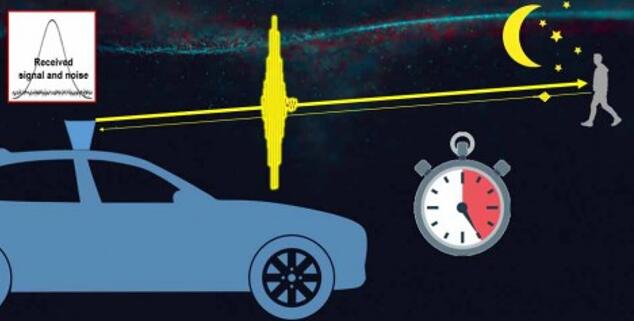
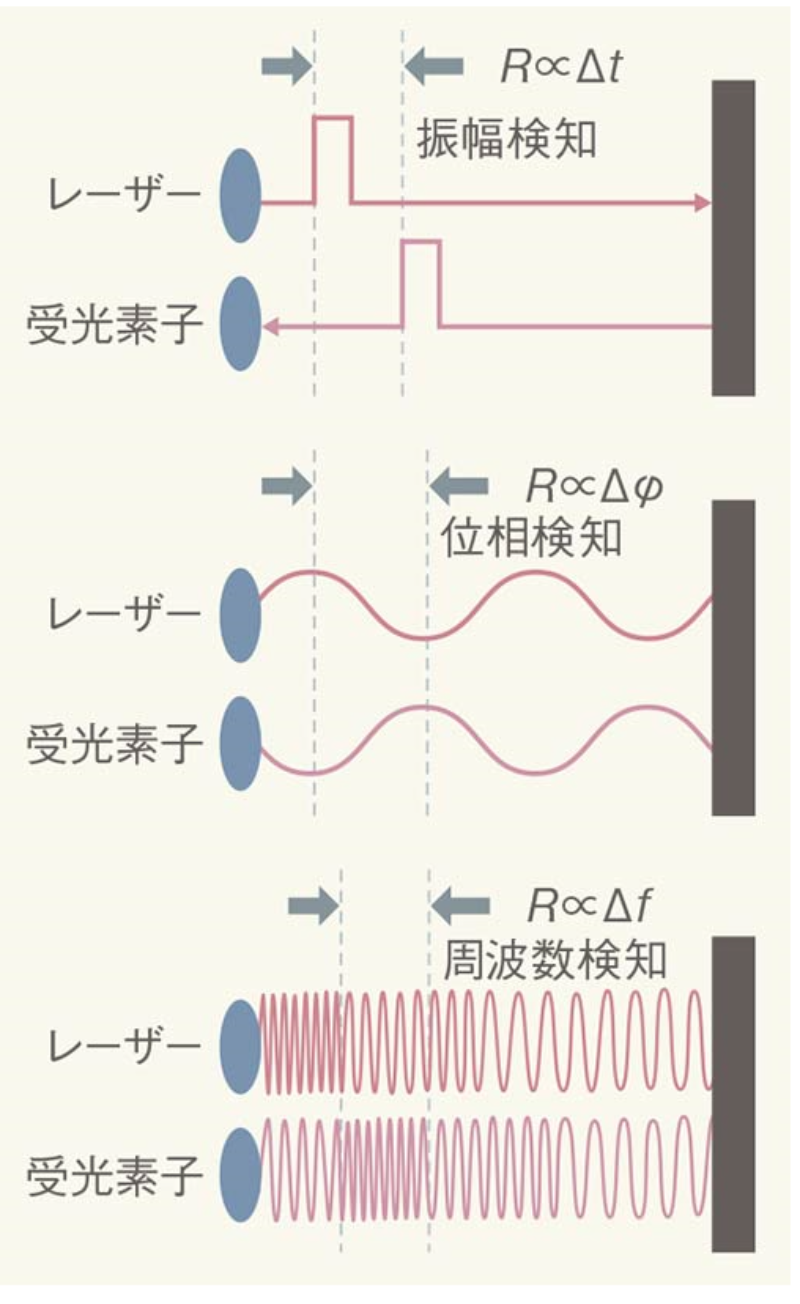
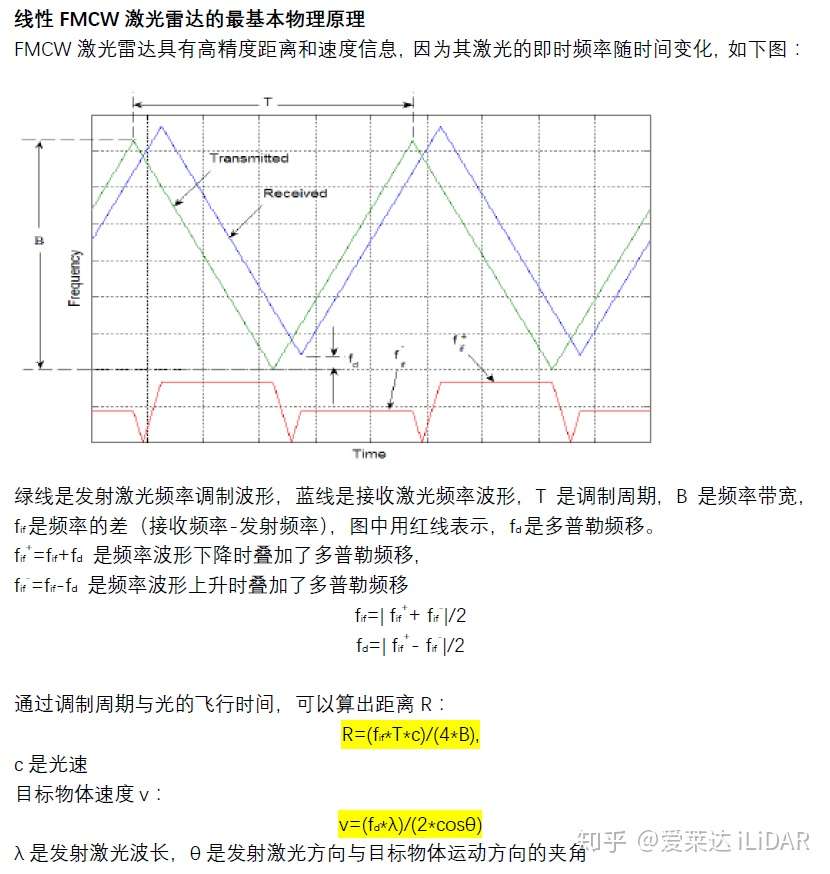
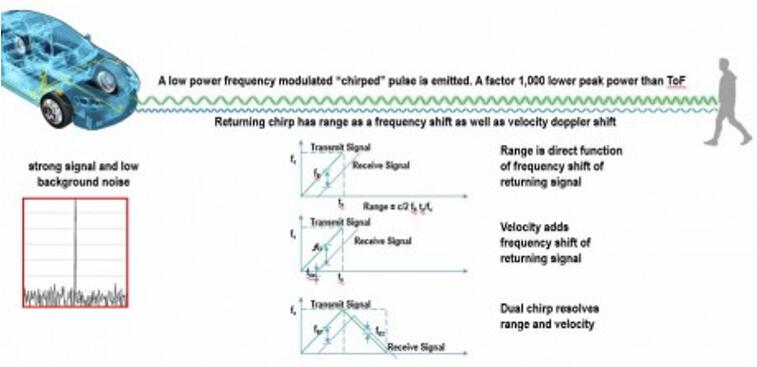
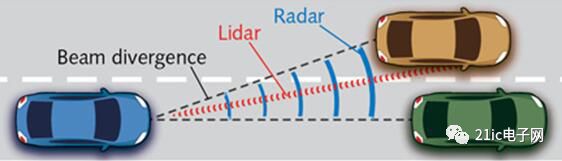
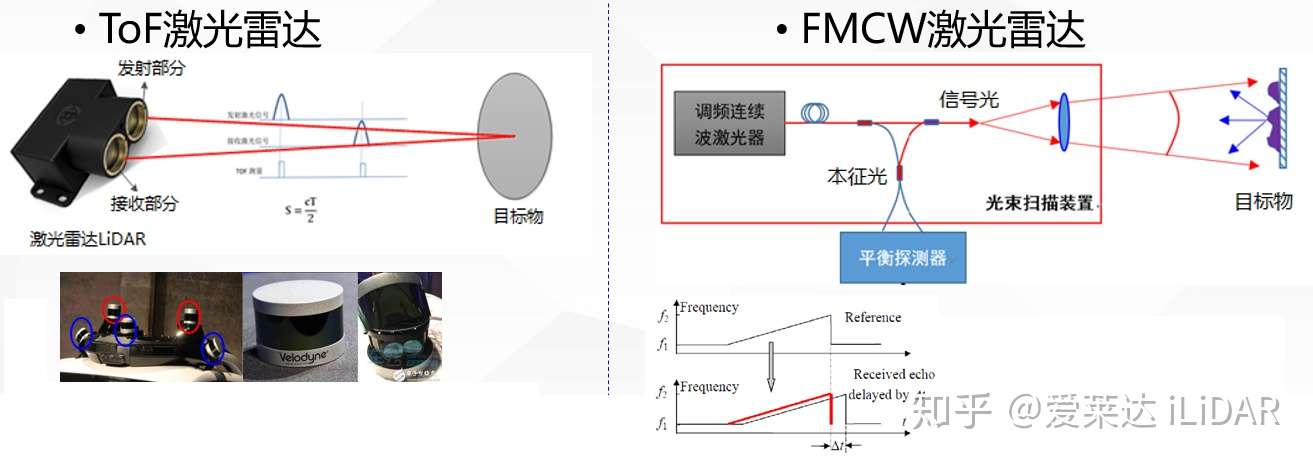
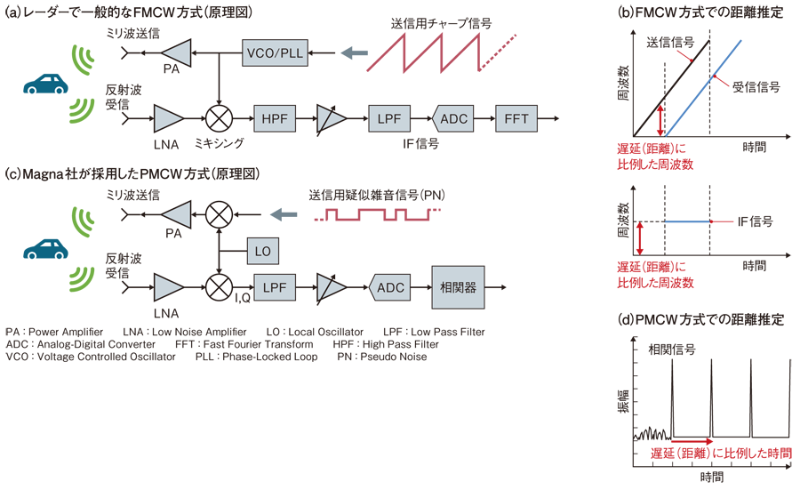
2 fmcw レーダの動作原理 図1 にfmcw レーダの基本構成図を示す.fmcw レーダでは,vco により周波数変調した電波を送信ア ンテナtx から発射,対象物に反射した電波をアンテ ナrx により受信し,送信波とのミキシングによりビ. 4.レーダの原理 41 測位と測速 レーダに要求される基本機能は,位置測定機 能(測位)および相対速度測定機能(測速)の 二つである.図1 に測位原理を示す. 図1 レーダの測位原理 レーダは内部で発生した電波を外部空間に向. LiDARの距離計測には、ToF(Time of Flight)を使うことが一般的だが、ここへ来てFMCW(Frequency Modulated Continuous Wave)方式が増えている。ToFは、パルス光を発して反射光の遅延時間から距離を計測する。FMCWでは反射波の周波数変化を読み取る(図1)。.
レーダーの受信電力 z孤立型標的(航空機など) 受信電力は距離の4乗に逆比例して小さくなる z分布型標的、分反射標的(降水や雲霧など) 受信電力は距離の2乗に逆比例して小さくなる 電波の途中経路での減衰 ¾大気による減衰(酸素による吸収、水蒸気) 式6.57と6.58参照. レーダの原理無線機器の原理と操作v50 Jan21 1 1st Lst 語源 2 山に向かって大声で叫ぶとエコー(こだま、反響)が返ってくる。いま、 発声からエコーを聞くまでの時間を2 秒とすれば、声は340×2=680.

无扫描激光三维成像雷达研究进展及趋势分析

Fmcw激光雷达 Light Ck Csdn博客
创新的fmcw激光雷达实现远距离3d人脸和物体识别 Eda365电子论坛通信数码 人工智能 计算机 半导体 手机家电消费电子硬件门户网站

Uhnder 雑音に強い デジタル レーダー技術 日経クロステック Xtech

Fmcw 技术加身 Aurora 也自研lidar 啦 自动驾驶 自动驾驶汽车 Lidar Fmcw Aurora 网易订阅
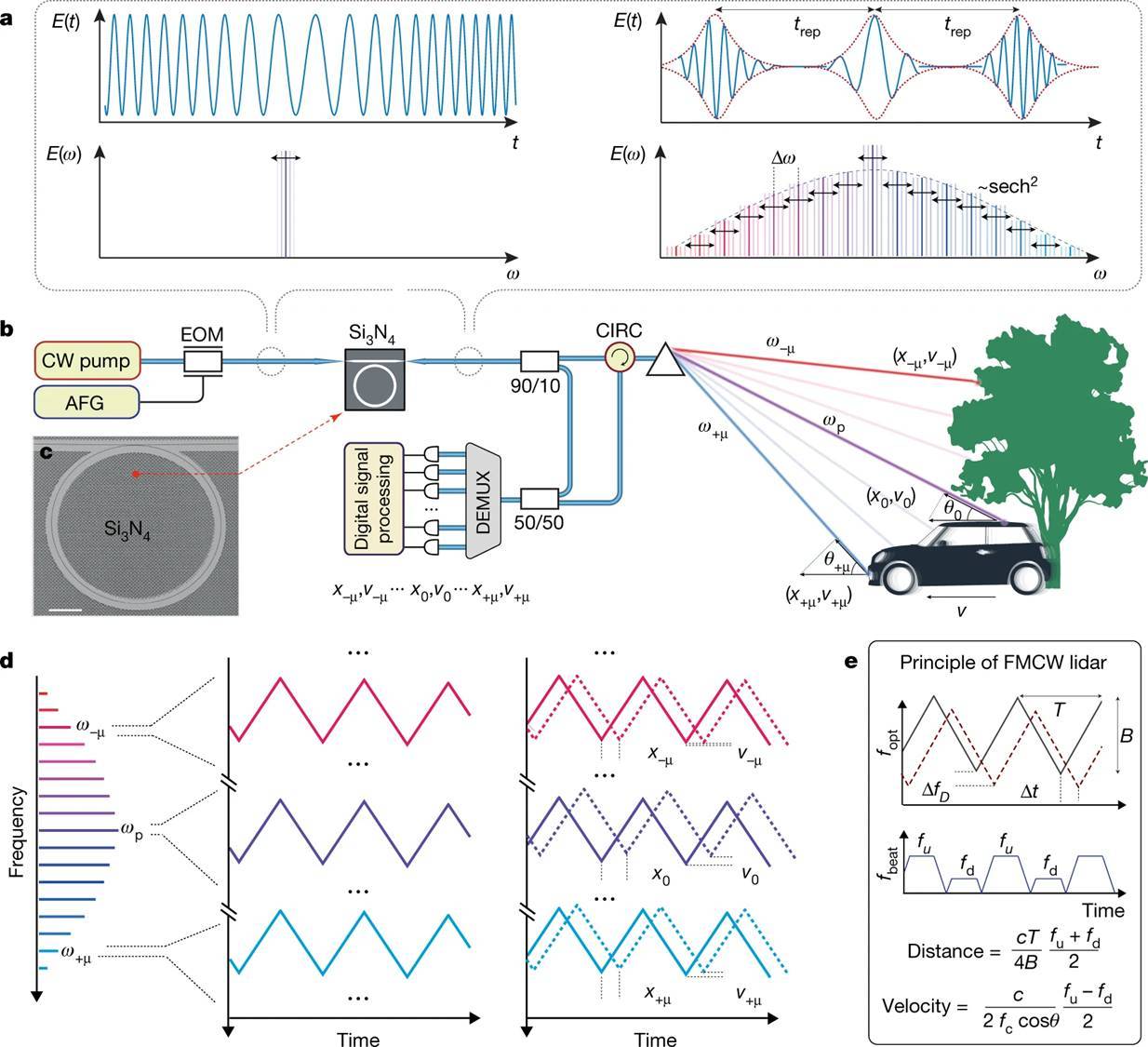
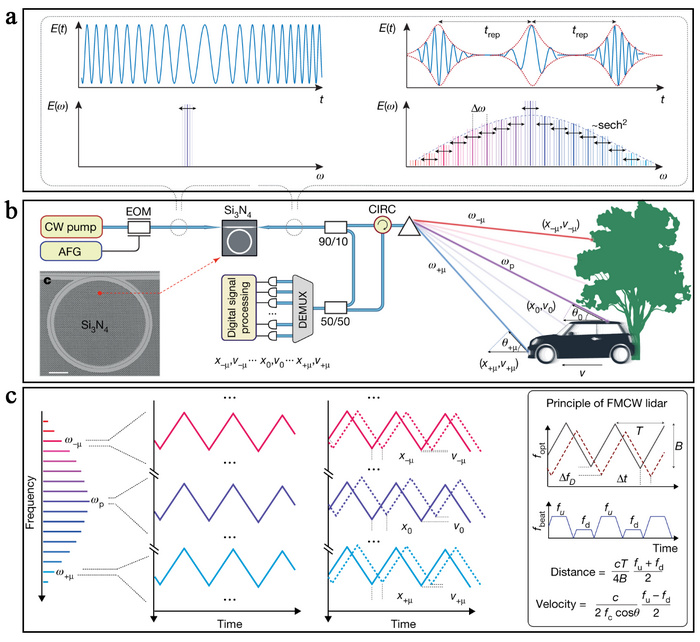
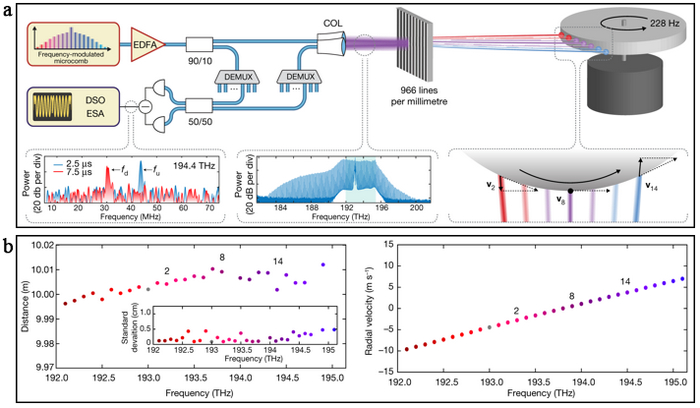
Nature 新方法加快远程相干激光雷达的速度 集成

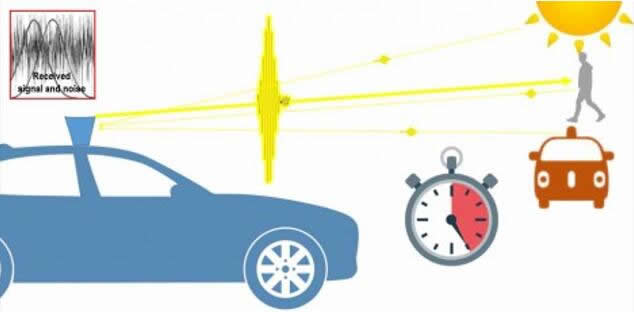
Comparison On Detection Performance Of Fmcw And Pulsed Lidar In Aerosol Environment

自动驾驶基础 四十一 全固态lidar之调频连续波lidar 自动驾驶测试 汽车测试网

为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体

自动驾驶车辆感知检测 汽车 亚德诺半导体

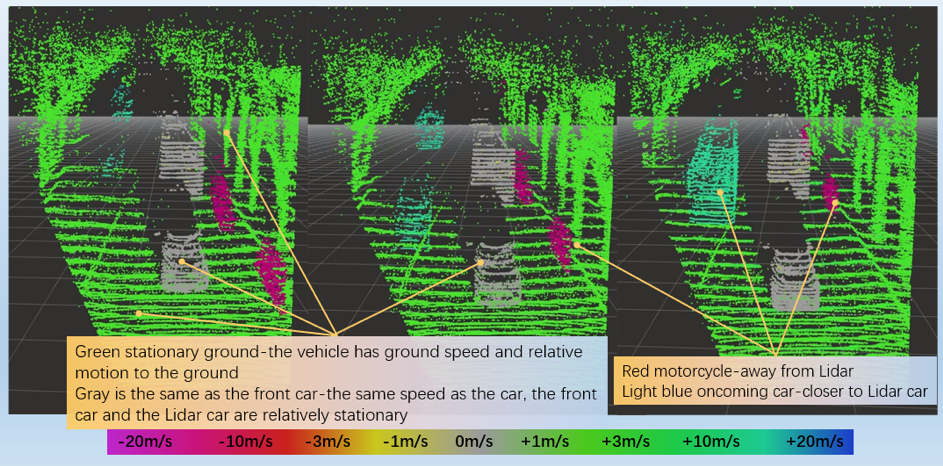
两大原理的对比 飞行时间原理与fmcw原理 虹科 虹科自动驾驶

Fmcw激光雷达 Light Ck Csdn博客
激光雷达 Tof与fmcw之争 激光雷达 Tof
深度解析自动驾驶激光雷达技术原理 感知系统的发展趋势 传感技术 与非网
Mobileye英特尔激光雷达剖析 控制器 处理器 与非网

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

車載lidarの距離計測に脱tofの動き 日経クロステック Xtech
G Metro可调谐激光技术在激光雷达和车联网产业的应用与实践

雷达 毫米波雷达 77ghz Fmcw 测距原理 静谧 淡雅 Csdn博客 毫米波雷达测距

第17期 图灵奖得主门生详解融合硅光芯片及fmcw技术的激光雷达系统

两大原理的对比 飞行时间原理与fmcw原理 虹科 虹科自动驾驶
科普 激光雷达lidar工作原理 懂车帝

雷达 毫米波雷达 77ghz Fmcw 测距原理 静谧 淡雅 Csdn博客 毫米波雷达测距

瑞士科研团队利用光子集成电路实现fmcw Lidar小型化 讯石光通讯网 做光通讯行业的充电站
Lidar系列報道 四 汽車lidar的 終結者 全固態lidar Mems 微文庫

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

Um3enm3eaad5nm
自动驾驶基础 四十一 全固态lidar之调频连续波lidar 自动驾驶测试 汽车测试网
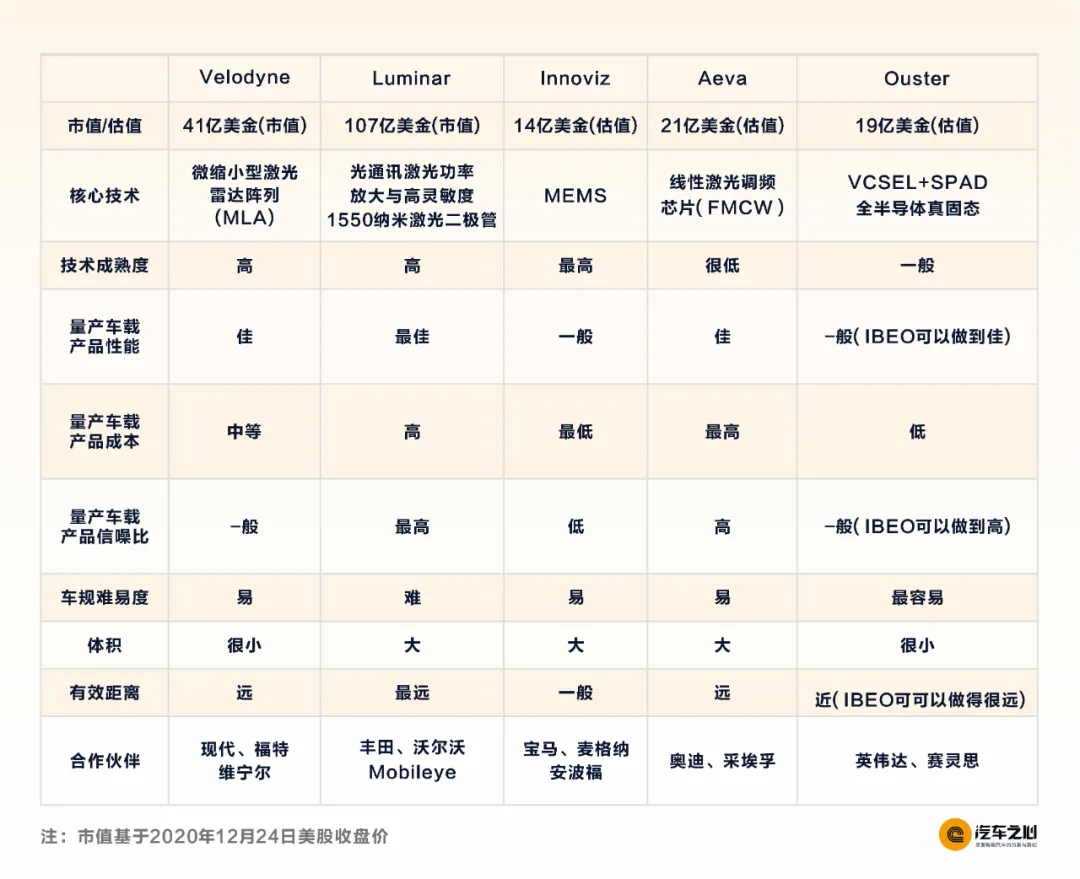
最高百亿市值 五大lidar公司齐聚美股车载激光雷达将走向何方 手机新浪网
为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体
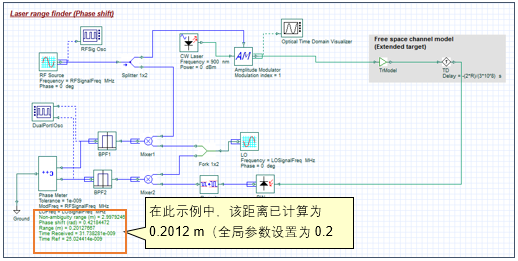
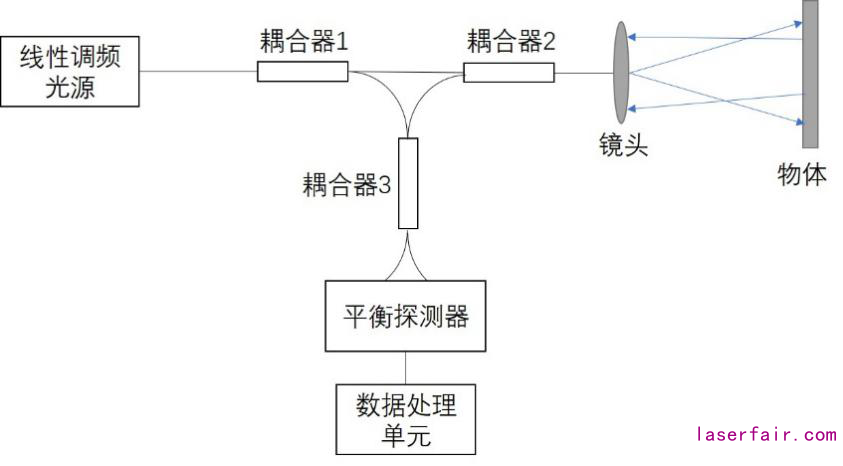
Optisystem应用 激光雷达系统设计 Optisystem Photondesign Rsoft 光行天下 国内最大的光电技术社区 光学 光电 光机技术及其软件运用交流社区

两大原理的对比 飞行时间原理与fmcw原理 虹科 虹科自动驾驶

为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体

Fmcw技術加身 自駕新創公司aurora也自研lidar啦

Fmcw激光雷达 Light Ck Csdn博客

自動駕駛基礎 雷射雷達綜述 每日頭條
汽车lidar产业研究 激光雷达规模量产前夜 五大技术路线进展如何 佐思汽车研究 微信公众号文章阅读 Wemp
科普 激光雷达lidar工作原理 懂车帝
科普 激光雷达lidar工作原理 懂车帝
瑞士科研团队利用光子集成电路实现fmcw Lidar小型化 讯石光通讯网 做光通讯行业的充电站
四大维度为你解析激光雷达lidar的核心技术 电子工程世界 Eeworld
一文读懂激光雷达在自动驾驶中的应用 知乎

第二代激光雷达的竞争 从宝马和innoviz开始 第一电动网

频率调制连续波激光雷达技术基础与研究进展

频率调制连续波激光雷达技术基础与研究进展

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

无扫描激光三维成像雷达研究进展及趋势分析
Fmcw调频连续波雷达基础知识 智小星的博客 Csdn博客 调频连续波
为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体
瑞士科研团队利用光子集成电路实现fmcw Lidar小型化 讯石光通讯网 做光通讯行业的充电站
最高百亿市值 五大lidar公司齐聚美股车载激光雷达将走向何方 激光雷达 量产车 自动驾驶 新浪科技 新浪网

题目二 车载激光雷达 从原理到应用 李铀博士 上 Youtube

雷射雷達固態化 技術進化與創業江湖 每日頭條
为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体

光達競爭白熱化第一波洗牌序幕悄然拉開 電子工程專輯
Steravision 走査手法を工夫した レーダー型 Lidar 日経クロステック Xtech
一文读懂激光雷达在自动驾驶中的应用 知乎

频率调制连续波激光雷达技术基础与研究进展

調頻連續波雷達 Fmcw 測距 測速原理 看完這篇基本就懂了 每日頭條
車載lidarの距離計測に脱tofの動き 日経クロステック Xtech
自动驾驶基础 四十一 全固态lidar之调频连续波lidar 自动驾驶测试 汽车测试网
四大维度为你解析激光雷达lidar的核心技术 电子工程世界 Eeworld

两大原理的对比 飞行时间原理与fmcw原理 虹科 虹科自动驾驶
コレクションfmcw Lidar 原理 ホームすべての写真 コレクター

两大原理的对比 飞行时间原理与fmcw原理 虹科 虹科自动驾驶

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

频率调制连续波激光雷达技术基础与研究进展
雷达 毫米波雷达 77ghz Fmcw 测距原理 静谧 淡雅 Csdn博客 毫米波雷达测距
为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体
为什么说调频连续波 Fmcw 激光雷达是代表未来的终极方案 系统集成商 微迷 专业mems市场调研媒体

深度 一篇 全固态lidar 解析文 世界知名激光设备制造商 深圳市普达镭射科技有限公司

瑞士科学家开发出fmcw激光雷达并行测量新技术 集成
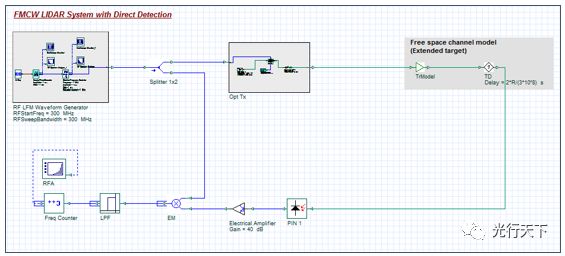
Optisystem应用 激光雷达系统设计

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

由iphone12說說鐳射雷達fmcw鐳射雷達 It人

Fmcw 雷达基本原理 讨论 中文资源库 Engineerzone

题目二 车载激光雷达 从原理到应用 李铀博士 下 Youtube
携硅光技术 Fmcw全固态激光雷达系统 这家 黑科技 公司杀入ai芯片市场 看点快报
自动驾驶基础 四十一 全固态lidar之调频连续波lidar 自动驾驶测试 汽车测试网

虹科自动驾驶 飞行时间原理vs Fmcw原理 知乎

如何获得最新 智能驾驶激光雷达行业蓝皮书 激光网 激光新闻 激光器 半导体激光设备 光粒网 中国光电行业门户
一文读懂激光雷达在自动驾驶中的应用 知乎
一文详解激光雷达技术关键在哪

Millimeter Wave Radar Advantages And Disadvantages Of Fmcw Radar Programmer Sought
一页说明白tof激光雷达与fmcw激光雷达的原理差异 知乎
一文读懂激光雷达在自动驾驶中的应用 知乎
自动驾驶基础 四十一 全固态lidar之调频连续波lidar 自动驾驶测试 汽车测试网
潮科技 这里有一份fmcw 与tof 激光雷达技术比较待查收 详细解读 最新资讯 热点事件 36氪
瑞士科研团队利用光子集成电路实现fmcw Lidar小型化 讯石光通讯网 做光通讯行业的充电站
专注于fmcw激光雷达技术 光勺科技 已完成500万元天使轮投资 多普勒

第17期 图灵奖得主门生详解融合硅光芯片及fmcw技术的激光雷达系统
コレクションfmcw Lidar 原理 ホームすべての写真 コレクター
一文读懂激光雷达在自动驾驶中的应用 知乎



